Hi guys,
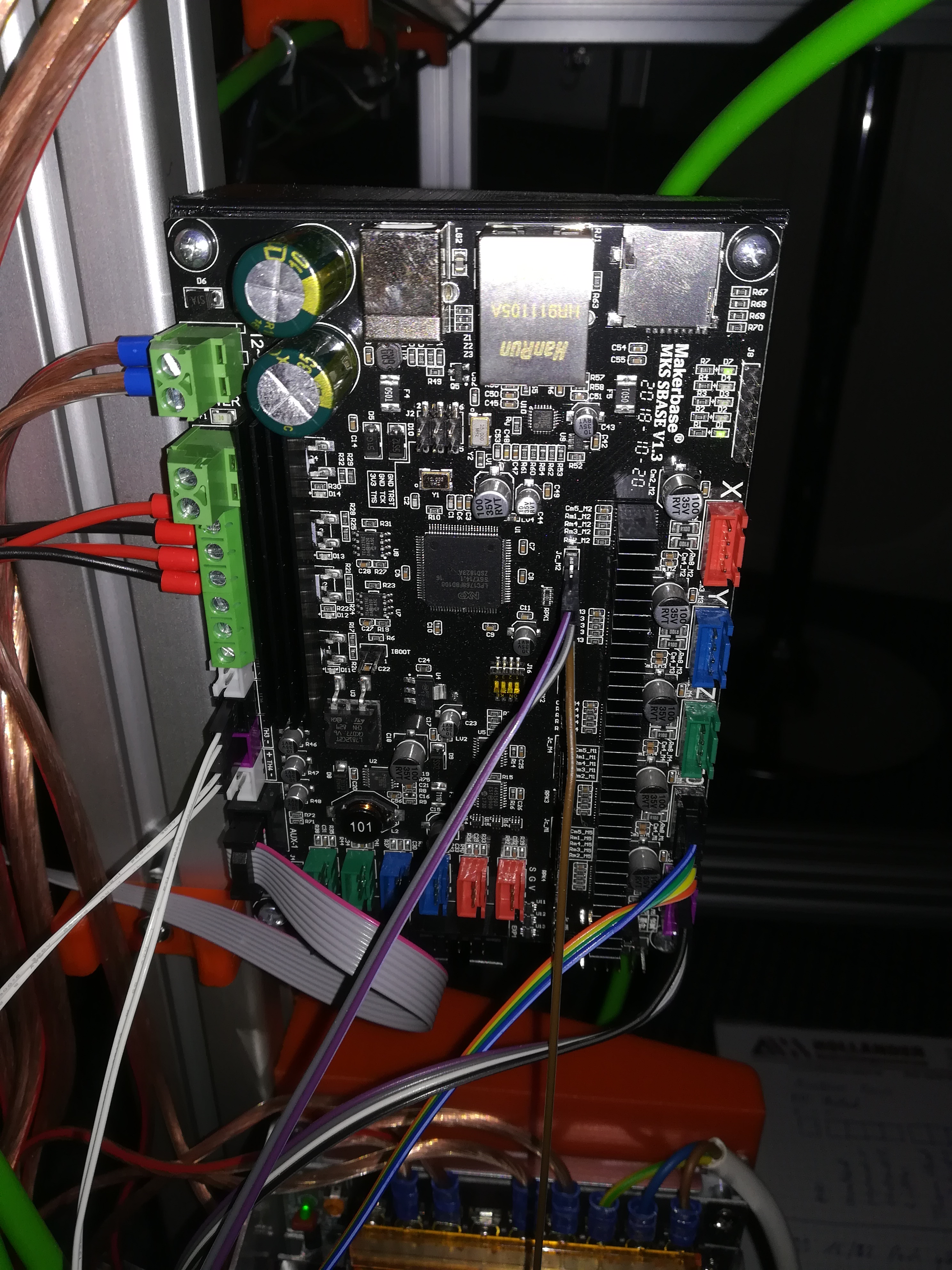
now with pictures for you and technical details:
I attached you my config file, that you can see what i did, maybe there are some mistakes.
> # Smoothieboard configuration file, see http://smoothieware.org/configuring-smoothie
# NOTE Lines must not exceed 132 characters, and '#' characters mean what follows is ignored
## Robot module configurations : general handling of movement G-codes and slicing into moves
# Basic motion configuration
default_feed_rate 60000 # Default speed (mm/minute) for G1/G2/G3 moves
default_seek_rate 60000 # Default speed (mm/minute) for G0 moves
mm_per_arc_segment 0.0 # Fixed length for line segments that divide arcs, 0 to disable
#mm_per_line_segment 5 # Cut lines into segments this size
mm_max_arc_error 0.01 # The maximum error for line segments that divide arcs 0 to disable
# note it is invalid for both the above be 0
# if both are used, will use largest segment length based on radius
# Arm solution configuration : Cartesian robot. Translates mm positions into stepper positions
# See http://smoothieware.org/stepper-motors
alpha_steps_per_mm 152 # Steps per mm for alpha ( X ) stepper
beta_steps_per_mm 152 # Steps per mm for beta ( Y ) stepper
gamma_steps_per_mm 456 # Steps per mm for gamma ( Z ) stepper
# Planner module configuration : Look-ahead and acceleration configuration
# See http://smoothieware.org/motion-control
acceleration 15000 # Acceleration in mm/second/second.
#z_acceleration 5000 # Acceleration for Z only moves in mm/s^2, 0 uses acceleration which is the default. DO NOT SET ON A DELTA
junction_deviation 0.01 # See http://smoothieware.org/motion-control#junction-deviation
#z_junction_deviation 0.0 # For Z only moves, -1 uses junction_deviation, zero disables junction_deviation on z moves DO NOT SET ON A DELTA
# Cartesian axis speed limits
x_axis_max_speed 80000 # Maximum speed in mm/min
y_axis_max_speed 80000 # Maximum speed in mm/min
z_axis_max_speed 20000 # Maximum speed in mm/min
# Stepper module configuration
# Pins are defined as ports, and pin numbers, appending "!" to the number will invert a pin
# See http://smoothieware.org/pin-configuration and http://smoothieware.org/pinout
alpha_step_pin 2.0 # Pin for alpha stepper step signal
alpha_dir_pin 0.5 # Pin for alpha stepper direction, add '!' to reverse direction
alpha_en_pin 0.4 # Pin for alpha enable pin
alpha_current 1.5 # X stepper motor current
alpha_max_rate 30000.0 # Maximum rate in mm/min
beta_step_pin 2.1 # Pin for beta stepper step signal
beta_dir_pin 0.11 # Pin for beta stepper direction, add '!' to reverse direction
beta_en_pin 0.10 # Pin for beta enable
beta_current 1.5 # Y stepper motor current
beta_max_rate 30000.0 # Maxmimum rate in mm/min
gamma_step_pin 2.2 # Pin for gamma stepper step signal
gamma_dir_pin 0.20 # Pin for gamma stepper direction, add '!' to reverse direction
gamma_en_pin 0.19 # Pin for gamma enable
gamma_current 1.5 # Z stepper motor current
gamma_max_rate 300.0 # Maximum rate in mm/min
## Extruder module configuration
# See http://smoothieware.org/extruder
extruder.hotend.enable true # Whether to activate the extruder module at all. All configuration is ignored if false
extruder.hotend.steps_per_mm 415 # Steps per mm for extruder stepper
extruder.hotend.default_feed_rate 18000 # Default rate ( mm/minute ) for moves where only the extruder moves
extruder.hotend.acceleration 3000 # Acceleration for the stepper motor mm/sec²
extruder.hotend.max_speed 250 # Maximum speed in mm/s
extruder.hotend.step_pin 2.3 # Pin for extruder step signal
extruder.hotend.dir_pin 0.22 # Pin for extruder dir signal ( add '!' to reverse direction )
extruder.hotend.en_pin 0.21 # Pin for extruder enable signal
# Extruder offset
#extruder.hotend.x_offset 0 # X offset from origin in mm
#extruder.hotend.y_offset 0 # Y offset from origin in mm
#extruder.hotend.z_offset 0 # Z offset from origin in mm
# Firmware retract settings when using G10/G11, these are the defaults if not defined, must be defined for each extruder if not using the defaults
#extruder.hotend.retract_length 3 # Retract length in mm
#extruder.hotend.retract_feedrate 200 # Retract feedrate in mm/sec
#extruder.hotend.retract_recover_length 0 # Additional length for recover
#extruder.hotend.retract_recover_feedrate 8 # Recover feedrate in mm/sec (should be less than retract feedrate)
#extruder.hotend.retract_zlift_length 0 # Z-lift on retract in mm, 0 disables
#extruder.hotend.retract_zlift_feedrate 6000 # Z-lift feedrate in mm/min (Note mm/min NOT mm/sec)
delta_current 1.8 # First extruder stepper motor current
# Second extruder module configuration
#extruder.hotend2.enable false # Whether to activate the extruder module at all. All configuration is ignored if false
#extruder.hotend2.steps_per_mm 415 # Steps per mm for extruder stepper
#extruder.hotend2.default_feed_rate 18000 # Default rate ( mm/minute ) for moves where only the extruder moves
#extruder.hotend2.acceleration 3000 # Acceleration for the stepper motor, as of 0.6, arbitrary ratio
#extruder.hotend2.max_speed 250 # mm/s
#extruder.hotend2.step_pin 2.8 # Pin for extruder step signal
#extruder.hotend2.dir_pin 2.13 # Pin for extruder dir signal ( add '!' to reverse direction )
#extruder.hotend2.en_pin 4.29 # Pin for extruder enable signal
#extruder.hotend2.x_offset 0 # x offset from origin in mm
#extruder.hotend2.y_offset 25.0 # y offset from origin in mm
#extruder.hotend2.z_offset 0 # z offset from origin in mm
#epsilon_current 1.8 # Second extruder stepper motor current
## Laser module configuration
# See http://smoothieware.org/laser
laser_module_enable false # Whether to activate the laser module at all
laser_module_pwm_pin 2.5 # This pin will be PWMed to control the laser.
# Only pins 2.0, 2.1, 2.2, 2.3, 2.4, 2.5, 1.18, 1.20, 1.21, 1.23, 1.24, 1.26, 3.25 and 3.26
# can be used since laser requires hardware PWM, see http://smoothieware.org/pinout
#laser_module_ttl_pin 1.30 # This pin turns on when the laser turns on, and off when the laser turns off.
#laser_module_maximum_power 1.0 # This is the maximum duty cycle that will be applied to the laser
#laser_module_minimum_power 0.0 # This is a value just below the minimum duty cycle that keeps the laser
# active without actually burning.
#laser_module_default_power 0.8 # This is the default laser power that will be used for cuts if a power has not been specified. The value is a scale between
# the maximum and minimum power levels specified above
#laser_module_pwm_period 20 # This sets the pwm frequency as the period in microseconds
## Temperature control configuration
# See http://smoothieware.org/temperaturecontrol
# First hotend configuration
temperature_control.hotend.enable true # Whether to activate this ( "hotend" ) module at all.
temperature_control.hotend.thermistor_pin 0.23 # Pin for the thermistor to read
temperature_control.hotend.heater_pin 2.7 # Pin that controls the heater, set to nc if a readonly thermistor is being defined
temperature_control.hotend.thermistor EPCOS100K # See http://smoothieware.org/temperaturecontrol#toc5
#temperature_control.hotend.beta 4066 # Or set the beta value
temperature_control.hotend.set_m_code 104 # M-code to set the temperature for this module
temperature_control.hotend.set_and_wait_m_code 109 # M-code to set-and-wait for this module
temperature_control.hotend.designator T # Designator letter for this module
#temperature_control.hotend.max_temp 350 # Set maximum temperature - Will prevent heating above 300 by default
#temperature_control.hotend.min_temp 0 # Set minimum temperature - Will prevent heating below if set
# Safety control is enabled by default and can be overidden here, the values show the defaults
# See http://smoothieware.org/temperaturecontrol#runaway
#temperature_control.hotend.runaway_heating_timeout 500 # How long it can take to heat up, max is 2040 seconds.
#temperature_control.hotend.runaway_cooling_timeout 0 # How long it can take to cool down if temp is set lower, max is 2040 seconds
#temperature_control.hotend.runaway_range 15 # How far from the set temperature it can wander, max setting is 63°C
# PID configuration
# See http://smoothieware.org/temperaturecontrol#pid
#temperature_control.hotend.p_factor 13.7 # P ( proportional ) factor
#temperature_control.hotend.i_factor 0.097 # I ( integral ) factor
#temperature_control.hotend.d_factor 24 # D ( derivative ) factor
#temperature_control.hotend.max_pwm 64 # Max pwm, 64 is a good value if driving a 12v resistor with 24v.
# Second hotend configuration
#temperature_control.hotend2.enable true # Whether to activate this ( "hotend" ) module at all.
#temperature_control.hotend2.thermistor_pin 0.25 # Pin for the thermistor to read
#temperature_control.hotend2.heater_pin 1.23 # Pin that controls the heater
#temperature_control.hotend2.thermistor EPCOS100K # See http://smoothieware.org/temperaturecontrol#thermistor
##temperature_control.hotend2.beta 4066 # or set the beta value
#temperature_control.hotend2.set_m_code 104 # M-code to set the temperature for this module
#temperature_control.hotend2.set_and_wait_m_code 109 # M-code to set-and-wait for this module
#temperature_control.hotend2.designator T1 # Designator letter for this module
#temperature_control.hotend2.p_factor 13.7 # P ( proportional ) factor
#temperature_control.hotend2.i_factor 0.097 # I ( integral ) factor
#temperature_control.hotend2.d_factor 24 # D ( derivative ) factor
#temperature_control.hotend2.max_pwm 64 # Max pwm, 64 is a good value if driving a 12v resistor with 24v.
temperature_control.bed.enable true # Whether to activate this ( "hotend" ) module at all.
temperature_control.bed.thermistor_pin 0.24 # Pin for the thermistor to read
temperature_control.bed.heater_pin 2.5 # Pin that controls the heater
temperature_control.bed.thermistor Honeywell100K # See http://smoothieware.org/temperaturecontrol#thermistor
#temperature_control.bed.beta 3974 # Or set the beta value
temperature_control.bed.set_m_code 140 # M-code to set the temperature for this module
temperature_control.bed.set_and_wait_m_code 190 # M-code to set-and-wait for this module
temperature_control.bed.designator B # Designator letter for this module
# Bang-bang ( simplified ) control
# See http://smoothieware.org/temperaturecontrol#bang-bang
#temperature_control.bed.bang_bang false # Set to true to use bang bang control rather than PID
#temperature_control.bed.hysteresis 2.0 # Set to the temperature in degrees C to use as hysteresis
## Switch modules
# See http://smoothieware.org/switch
# Switch module for fan control
switch.fan.enable true # Enable this module
switch.fan.input_on_command M106 # Command that will turn this switch on
switch.fan.input_off_command M107 # Command that will turn this switch off
switch.fan.output_pin 2.6 # Pin this module controls
switch.fan.output_type pwm # PWM output settable with S parameter in the input_on_comand
#switch.fan.max_pwm 255 # Set max pwm for the pin default is 255
#switch.misc.enable false # Enable this module
#switch.misc.input_on_command M42 # Command that will turn this switch on
#switch.misc.input_off_command M43 # Command that will turn this switch off
#switch.misc.output_pin 2.4 # Pin this module controls
#switch.misc.output_type digital # Digital means this is just an on or off pin
#switch.bltouch.enable false #
#switch.bltouch.output_pin 2.4 # sw pwm can use any digital pin
#switch.bltouch.input_on_command M280 #
#switch.bltouch.input_off_command M281 #
#switch.bltouch.output_type swpwm # sw pwm must be low frequency
#switch.bltouch.pwm_period_ms 20 # 50Hz
#switch.bltouch.startup_state false # start up in the stow state
#switch.bltouch.startup_value 7.43 # On boot it will go into stow mode, also set with the M281
#switch.bltouch.default_on_value 3.3 # if M280 is issued without S this is the value it will set it to
## Temperatureswitch
# See http://smoothieware.org/temperatureswitch
# Automatically toggle a switch at a specified temperature. Different ones of these may be defined to monitor different temperatures and switch different swithxes
# Useful to turn on a fan or water pump to cool the hotend
#temperatureswitch.hotend.enable false #
#temperatureswitch.hotend.designator T # first character of the temperature control designator to use as the temperature sensor to monitor
#temperatureswitch.hotend.switch misc # select which switch to use, matches the name of the defined switch
#temperatureswitch.hotend.threshold_temp 60.0 # temperature to turn on (if rising) or off the switch
#temperatureswitch.hotend.heatup_poll 15 # poll heatup at 15 sec intervals
#temperatureswitch.hotend.cooldown_poll 60 # poll cooldown at 60 sec intervals
## Endstops
# See http://smoothieware.org/endstops
endstops_enable true # The endstop module is enabled by default and can be disabled here
#corexy_homing false # Set to true if homing on a hbot or corexy
alpha_min_endstop 1.24^ # Pin to read min endstop, add a ! to invert if endstop is NO connected to ground
#alpha_max_endstop 1.25^ # Pin to read max endstop, uncomment this and comment the above if using max endstops
alpha_homing_direction home_to_min # Or set to home_to_max and set alpha_max and uncomment the alpha_max_endstop
alpha_min 0 # This gets loaded as the current position after homing when home_to_min is set
alpha_max 200 # This gets loaded as the current position after homing when home_to_max is set
beta_min_endstop 1.26^ # Pin to read min endstop, add a ! to invert if endstop is NO connected to ground
#beta_max_endstop 1.27^ # Pin to read max endstop, uncomment this and comment the above if using max endstops
beta_homing_direction home_to_min # Or set to home_to_max and set alpha_max and uncomment the alpha_max_endstop
beta_min 0 # This gets loaded as the current position after homing when home_to_min is set
beta_max 200 # This gets loaded as the current position after homing when home_to_max is set
gamma_min_endstop 1.28^ # Pin to read min endstop, add a ! to invert if endstop is NO connected to ground
#gamma_max_endstop 1.29^ # Pin to read max endstop, uncomment this and comment the above if using max endstops
gamma_homing_direction home_to_min # Or set to home_to_max and set alpha_max and uncomment the alpha_max_endstop
gamma_min 0 # This gets loaded as the current position after homing when home_to_min is set
gamma_max 200 # This gets loaded as the current position after homing when home_to_max is set
alpha_max_travel 500 # Max travel in mm for alpha/X axis when homing
beta_max_travel 500 # Max travel in mm for beta/Y axis when homing
gamma_max_travel 500 # Max travel in mm for gamma/Z axis when homing
# Optional enable limit switches, actions will stop if any enabled limit switch is triggered
#alpha_limit_enable false # Set to true to enable X min and max limit switches
#beta_limit_enable false # Set to true to enable Y min and max limit switches
#gamma_limit_enable false # Set to true to enable Z min and max limit switches
# Endstops home at their fast feedrate first, then once the endstop is found they home again at their slow feedrate for accuracy
alpha_fast_homing_rate_mm_s 50 # Alpha/X fast homing feedrate in mm/second
alpha_slow_homing_rate_mm_s 10 # Alpha/X slow homing feedrate in mm/second
beta_fast_homing_rate_mm_s 50 # Beta/Y fast homing feedrate in mm/second
beta_slow_homing_rate_mm_s 10 # Beta/Y slow homing feedrate in mm/second
gamma_fast_homing_rate_mm_s 50 # Gamma/Z fast homing feedrate in mm/second
gamma_slow_homing_rate_mm_s 10 # Gamma/Z slow homing feedrate in mm/second
alpha_homing_retract_mm 5 # Distance to retract from the endstop after it is hit for alpha/X
beta_homing_retract_mm 5 # Distance to retract from the endstop after it is hit for beta/Y
gamma_homing_retract_mm 1 # Distance to retract from the endstop after it is hit for gamma/Z
# Optional enable limit switches, actions will stop if any enabled limit switch is triggered (all are set for delta)
#alpha_limit_enable false # Set to true to enable X min and max limit switches
#beta_limit_enable false # Set to true to enable Y min and max limit switches
#gamma_limit_enable false # Set to true to enable Z min and max limit switches
# Optional order in which axis will home, default is they all home at the same time,
# If this is set it will force each axis to home one at a time in the specified order
#homing_order XYZ # X axis followed by Y then Z last
#move_to_origin_after_home false # Move XY to 0,0 after homing
endstop_debounce_count 100 # Uncomment if you get noise on your endstops, default is 100
#endstop_debounce_ms 1 # Uncomment if you get noise on your endstops, default is 1 millisecond debounce
#home_z_first true # Uncomment and set to true to home the Z first, otherwise Z homes after XY
# End of endstop config
# Delete the above endstop section and uncomment next line and copy and edit Snippets/abc-endstop.config file to enable endstops for ABC axis
#include abc-endstop.config
## Z-probe
# See http://smoothieware.org/zprobe
zprobe.enable false # Set to true to enable a zprobe
zprobe.probe_pin 1.28!^ # Pin probe is attached to, if NC remove the !
zprobe.slow_feedrate 5 # Mm/sec probe feed rate
#zprobe.debounce_ms 1 # Set if noisy
zprobe.fast_feedrate 100 # Move feedrate mm/sec
zprobe.probe_height 5 # How much above bed to start probe
#gamma_min_endstop nc # Normally 1.28. Change to nc to prevent conflict,
# Levelling strategy
# Example for 3-point levelling strategy, see wiki documentation for other strategies
#leveling-strategy.three-point-leveling.enable true # a leveling strategy that probes three points to define a plane and keeps the Z parallel to that plane
#leveling-strategy.three-point-leveling.point1 100.0,0.0 # the first probe point (x,y) optional may be defined with M557
#leveling-strategy.three-point-leveling.point2 200.0,200.0 # the second probe point (x,y)
#leveling-strategy.three-point-leveling.point3 0.0,200.0 # the third probe point (x,y)
#leveling-strategy.three-point-leveling.home_first true # home the XY axis before probing
#leveling-strategy.three-point-leveling.tolerance 0.03 # the probe tolerance in mm, anything less that this will be ignored, default is 0.03mm
#leveling-strategy.three-point-leveling.probe_offsets 0,0,0 # the probe offsets from nozzle, must be x,y,z, default is no offset
#leveling-strategy.three-point-leveling.save_plane false # set to true to allow the bed plane to be saved with M500 default is false
## Panel
# See http://smoothieware.org/panel
# Please find your panel on the wiki and copy/paste the right configuration here
panel.enable false # Set to true to enable the panel code
# Example for reprap discount GLCD
# on glcd EXP1 is to left and EXP2 is to right, pin 1 is bottom left, pin 2 is top left etc.
# +5v is EXP1 pin 10, Gnd is EXP1 pin 9
#panel.lcd reprap_discount_glcd #
#panel.spi_channel 0 # SPI channel to use ; GLCD EXP1 Pins 3,5 (MOSI, SCLK)
#panel.spi_cs_pin 0.16 # SPI chip select ; GLCD EXP1 Pin 4
#panel.encoder_a_pin 3.25!^ # Encoder pin ; GLCD EXP2 Pin 3
#panel.encoder_b_pin 3.26!^ # Encoder pin ; GLCD EXP2 Pin 5
#panel.click_button_pin 1.30!^ # Click button ; GLCD EXP1 Pin 2
#panel.buzz_pin 1.31 # Pin for buzzer ; GLCD EXP1 Pin 1
#panel.back_button_pin 2.11!^ # Back button ; GLCD EXP2 Pin 8
panel.menu_offset 0 # Some panels will need 1 here
panel.alpha_jog_feedrate 6000 # X jogging feedrate in mm/min
panel.beta_jog_feedrate 6000 # Y jogging feedrate in mm/min
panel.gamma_jog_feedrate 200 # Z jogging feedrate in mm/min
panel.hotend_temperature 185 # Temp to set hotend when preheat is selected
panel.bed_temperature 60 # Temp to set bed when preheat is selected
## Custom menus : Example of a custom menu entry, which will show up in the Custom entry.
# NOTE _ gets converted to space in the menu and commands, | is used to separate multiple commands
custom_menu.power_on.enable true #
custom_menu.power_on.name Power_on #
custom_menu.power_on.command M80 #
custom_menu.power_off.enable true #
custom_menu.power_off.name Power_off #
custom_menu.power_off.command M81 #
## Network settings
# See http://smoothieware.org/network
network.enable false # Enable the ethernet network services
network.webserver.enable true # Enable the webserver
network.telnet.enable true # Enable the telnet server
network.ip_address auto # Use dhcp to get ip address
# Uncomment the 3 below to manually setup ip address
#network.ip_address 192.168.3.222 # The IP address
#network.ip_mask 255.255.255.0 # The ip mask
#network.ip_gateway 192.168.3.1 # The gateway address
#network.mac_override xx.xx.xx.xx.xx.xx # Override the mac address, only do this if you have a conflict
## System configuration
# Serial communications configuration ( baud rate defaults to 9600 if undefined )
# For communication over the UART port, *not* the USB/Serial port
uart0.baud_rate 115200 # Baud rate for the default hardware ( UART ) serial port
second_usb_serial_enable false # This enables a second USB serial port
#leds_disable true # Disable using leds after config loaded
#play_led_disable true # Disable the play led
# Kill button maybe assigned to a different pin, set to the onboard pin by default
# See http://smoothieware.org/killbutton
kill_button_enable true # Set to true to enable a kill button
kill_button_pin 2.12 # Kill button pin. default is same as pause button 2.12 (2.11 is another good choice)
#msd_disable false # Disable the MSD (USB SDCARD), see http://smoothieware.org/troubleshooting#disable-msd
#dfu_enable false # For linux developers, set to true to enable DFU
# Only needed on a smoothieboard
# See http://smoothieware.org/currentcontrol
currentcontrol_module_enable true # Control stepper motor current via the configuration file
It is attached 2 Extruder motors at E0 and E1, to this 2 heatings for E0 and E1 and a thermistor aswell for E0 and E1. E1 has tourque and E0 not, but there i think it is a wiring problem. But it still didnt move.
Like you see, i have no reading of the thermistors, and the room has 20 degree celsius. I have there a other temperature measurment device. The XYZ motors are directly attached to the pins for the signals, all signals are used, and these are configured as open drain. On the + side of the signal there is +5V and on the mainboard i switch to ground. But there is no signal avialable.
Greetings Michael