@Peter_Spiess I have no idea…Chinese brand off of ebay for $25 Australian.

@Paul_Frederick what do you think is the ideal operating system? With which software do you run your machine? You are very aggressive against Windows and Mach3. Why?
I’m using Windows, Linux, Mach3 and LinuxCNC. Next month UCCNC will be added.
@Robert_Ritchie yes interesting discussion. I used to wire up industrial control systems. I like it when I see a cnc build using DIN rail components. It makes a neater and reliable build. I use it when I can but does gets expensive fast. None of my machine controllers are done as nice. Just Geckodrives mounted to heat sinks and stuck in a box, of course a mess of wires. I’m a old engineer so I can fix things easily enough when it breaks.
Keep learning. Lots of fun.
@Peter_Spiess it is difficult to hit a moving target. There are a lot of changes going on constantly with hardware, and software technology. Those changes have an impact on what can be perceived as “ideal”.
The big change making waves today is the rise in microcontroller availability. Today a microcontroller costs what a single chip used to. But I still don’t think software has quite caught up to take full advantage of that fact yet.
Which gives old OS bound motion controllers an edge still. But their days are numbered. Right this minute I’d say LinuxCNC is the best choice. I don’t even know if I could say it is the best investment though.
Because the future is definitely GRBL, or something like it.
@Paul_Frederick I’m using GRBl, but wish it was not so tightly tied to the architecture of the Atmega chip. Do you know of any next generation projects that could be deployed on modern hardware?
@Jay_Polo I run grbl-lpc on Cohesion3d board in my laser. It is also compatible to smoothieware. Very fast!!! It’s a port of grbl on the ARM lpc1768
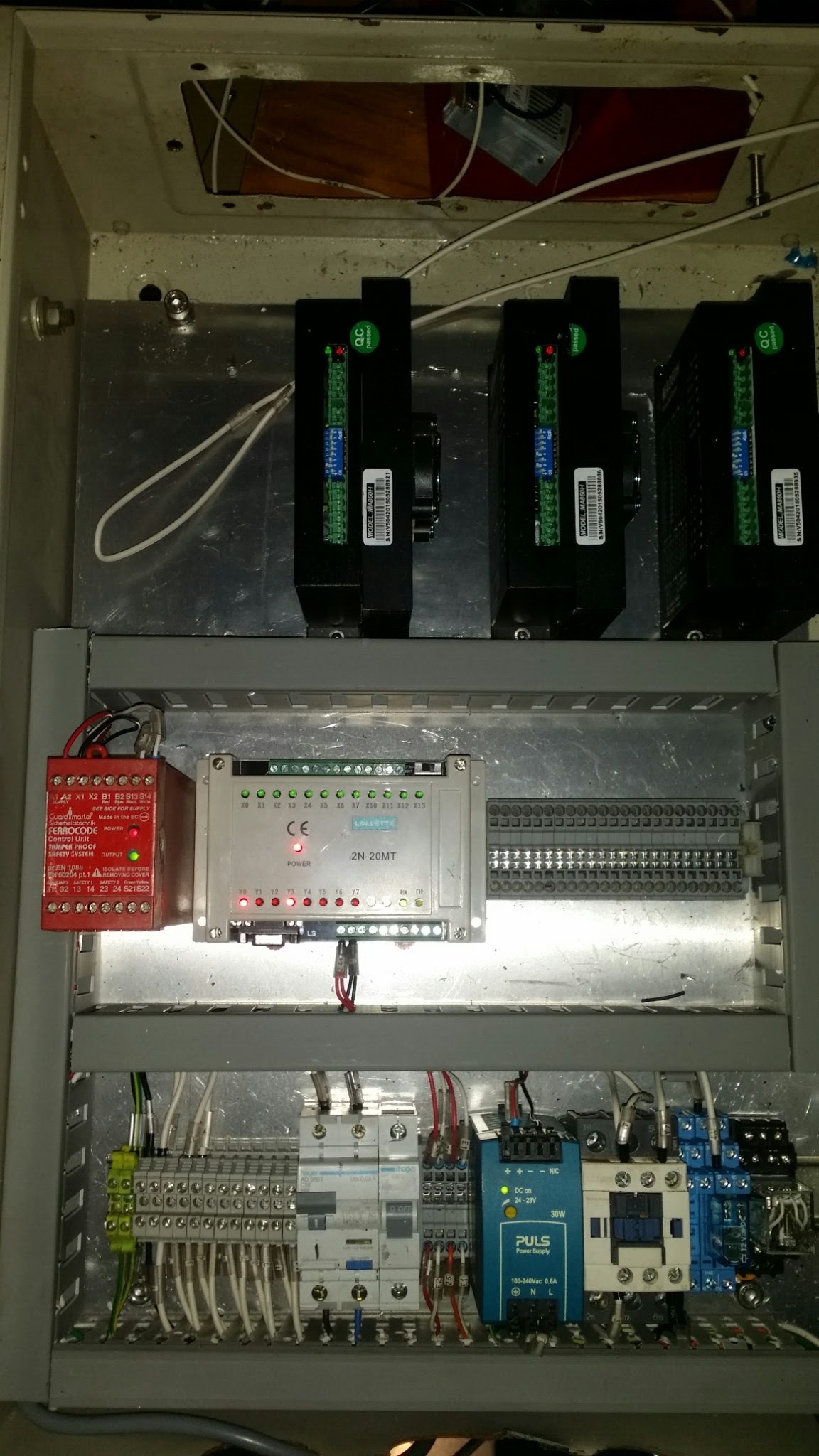
I had a few hours before work tonight so I added in the din rail and slotted duct. I optimized the components to keep the mains voltage confined to the lower section as much as possible. This is the final layout before wiring. As you can see I still have to fit the MA860H stepper drivers. I would like to have four of them eventually to drive an A axis. Thanks for all the motion control tips they really save me a lot of experimenting.

@Peter_Spiess we have pretty powerful microcontrollers now. The chip on an Arduino Uno specs higher than the first PCs ever made. It is on the low end of the power spectrum for microcontrollers today too.
@Robert_Ritchie from what I’ve read, those MA860h drivers are really good. Suppose to be even better than the Geckodrives I use. I need to buy one to compare/test soon. I have dozens of different stepper and servo drivers collected over the years. I use geckos since they have been really reliable for me, I have about 15 of them. The only time two died is when my house got hit by a direct lightning strike. Gecko replaced them for free even though they were about 8 years old. $$$$$$$ in other electronic equipment went up in smoke too.
@Jim_Fong Yes I have tried a few different stepper drivers and the MA860h is the best I have found so far.
This is a 230 Volts DC motor I plan to use for the spindle that I will fit into the finned alloy case I believe it is rated at 2000 watts. The chuck is an ER16.

How would you control the motor? Only on and off or with speed regulation?
@Peter_Spiess I have a speed controller that has a manual knob that I am planning to build an interface with the Mach3 BOB.
Max safe speed is 6500 rpm.
Has your interface an 0 to 10V input for speed controlling?
@Peter_Spiess That is the idea to use the PWM 0-10V output from the Mach3 BOB then optically couple that to the 100K Ohm variable resistor that controls the speed.