Hi Forum Folke,
Printing newbie here. Yeah, I can hear the groans now! ![]()
I’ve had an Ender 3 since Christmas, and have made plenty of decent headway with overcoming the learning curve. I was a mechanic for most of my working life, so the mechanical end of things is trivial for me… but it’s the coding side that has me quaking in my boots, as I’ve never written a single line of code of any kind, not even in Basic.
I just upgraded to a BigTreeTech SKR Mini E3 version 2, which was bundled with a TFT35 E3 version 2 touchscreen color display. Neither has firmware flashed into them; they’re blank slates.
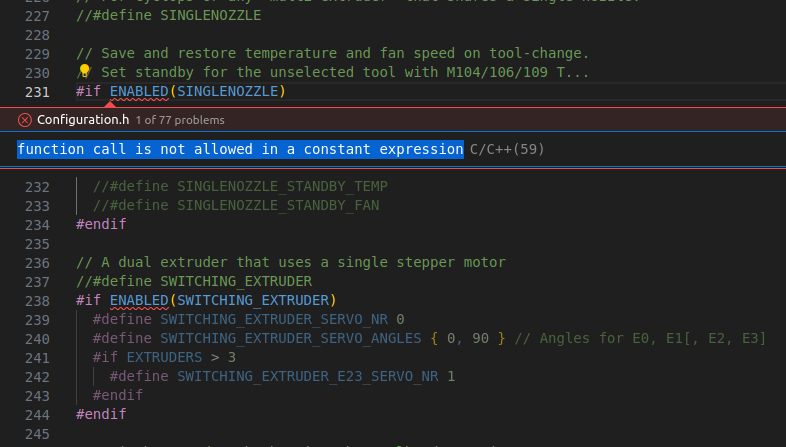
As I understand it, I need to take several files (configuration.h and configuration_adv.h for the control card, and a couple of different ones for the display card), load them into a development environment like Visual Basic (with the platform IO extension, and the Marlin AutoBuild extension which is supposed to make the process easier), make any adjustments to the appropriate lines (commenting out or un-commenting to enable the option), then “build” or “compile” the file into an binary file that is then uploaded into the appropriate card.
Sounds simple enough in theory, especially as the files in question seem to be like “swiss-army kinves,” with tons of possible options and settings already written in, but mostly commented out so they’re not active.
Also, there are a bunch of “example” files available in GitHub for different make/model printers. I found one for mine in the BigTreeTech pages in GitHub, for my cards and printer.
My question is this: can I just take that “example” configuration.h file and compile and load it into the card? I’ve seen a couple of warnings on the Marlin site cautioning against doing that, but no reason is given for this warning. The prevailing opinion there seems to be take the basic Marlin 2.1.2.1 file, configure it appropriately, then compile and load IT. Not sure why this is better and I’d like to understand this before proceeding.
The other question I have is that I don’t think I can flash both cards simultaneously (correct me if I’m wrong), in which case is there a “preferred order” to flash the cards in?
I do have a copy of the “configuration.h” file that shipped with the printer on a little 8GB micro-SD card, so at least I have that for reference. Went nuts trying to find out how to back up the firmware already in the printer (I’ve upgraded enough computer systems to know that you NEED to back up before proceeding), before I found the already-provided file, so that much is taken care of. I can “reset to original” should things go sideways on me.
Any direction from those familiar with the process would be greatly appreciated; there’s a wealth of info in GitHub, but I find that site a bit overwhelming and difficult to use… often scouring high and low trying to locate files (still looking for pins.h, after finally finding boards.h.)
Much appreciated!