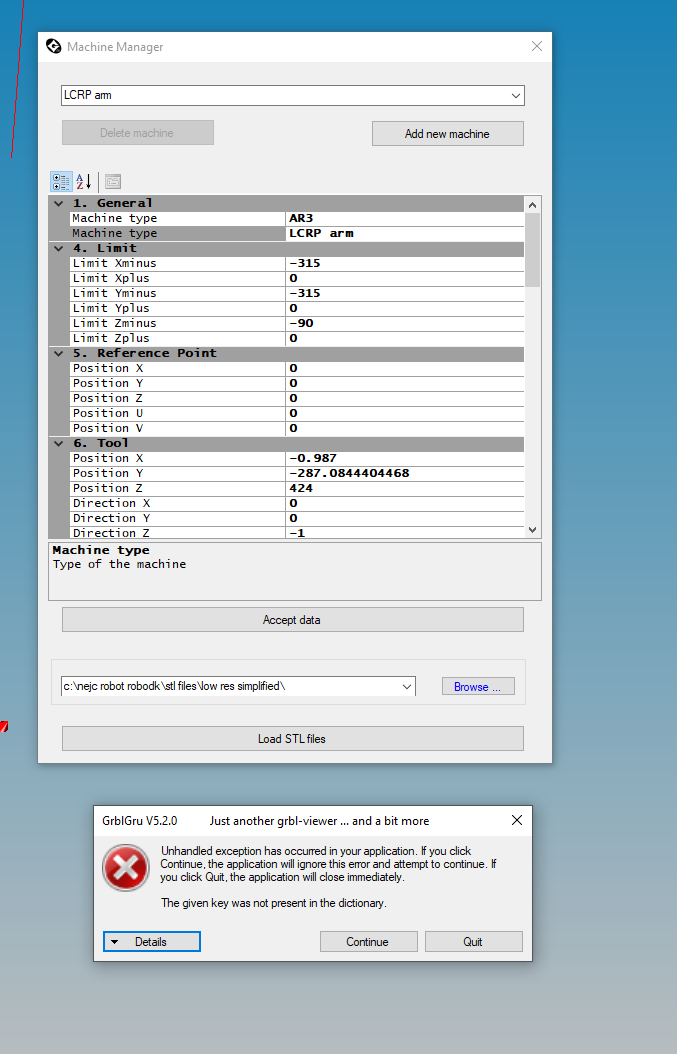
While trying to import my arm in the software and after selecting the file location and loading, i get an error saying The given key was not present. how do i fix it.

Hey, that’s a great robotor arm !
Please provide me with your STL files here. Then I can see what the problem is.
Here is the STEP file of the robot and also the stl. files i used in grbl gru
NKL Robot.step (3.2 MB)
1 Like
Did you discover what is wrong?
I have not found any errors. There is a new version V5.2.17 on my website.
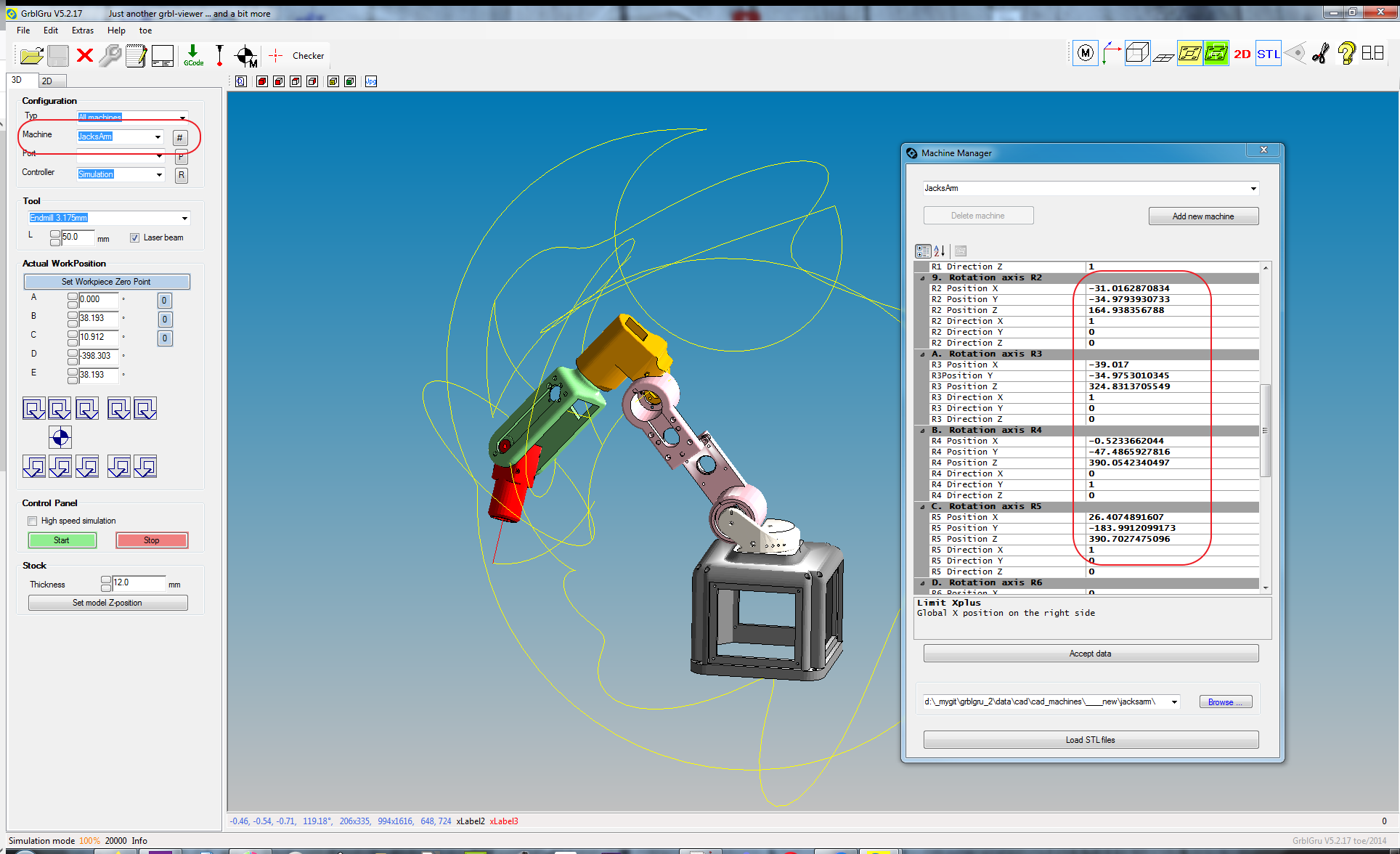
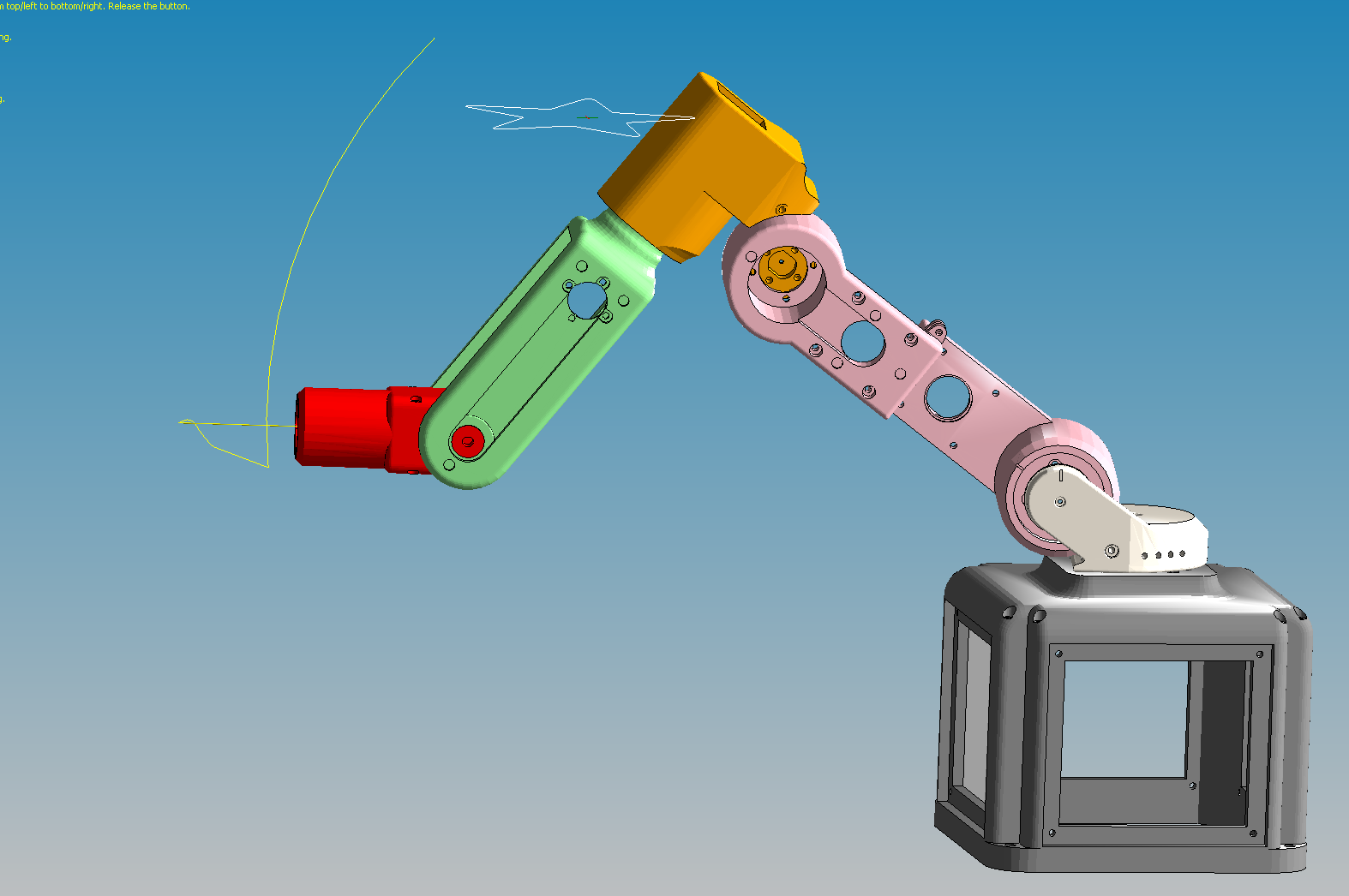
There is a new model “JacksArm”, which I created from your STLs.
Everything looks ok so far. I just noticed that the tool wobbles a little when the D-axis is rotated.
This may be due to the fact that the pivot points of the STLs involved do not match 100%.
However, I may have also made a mistake when entering the pivot point.
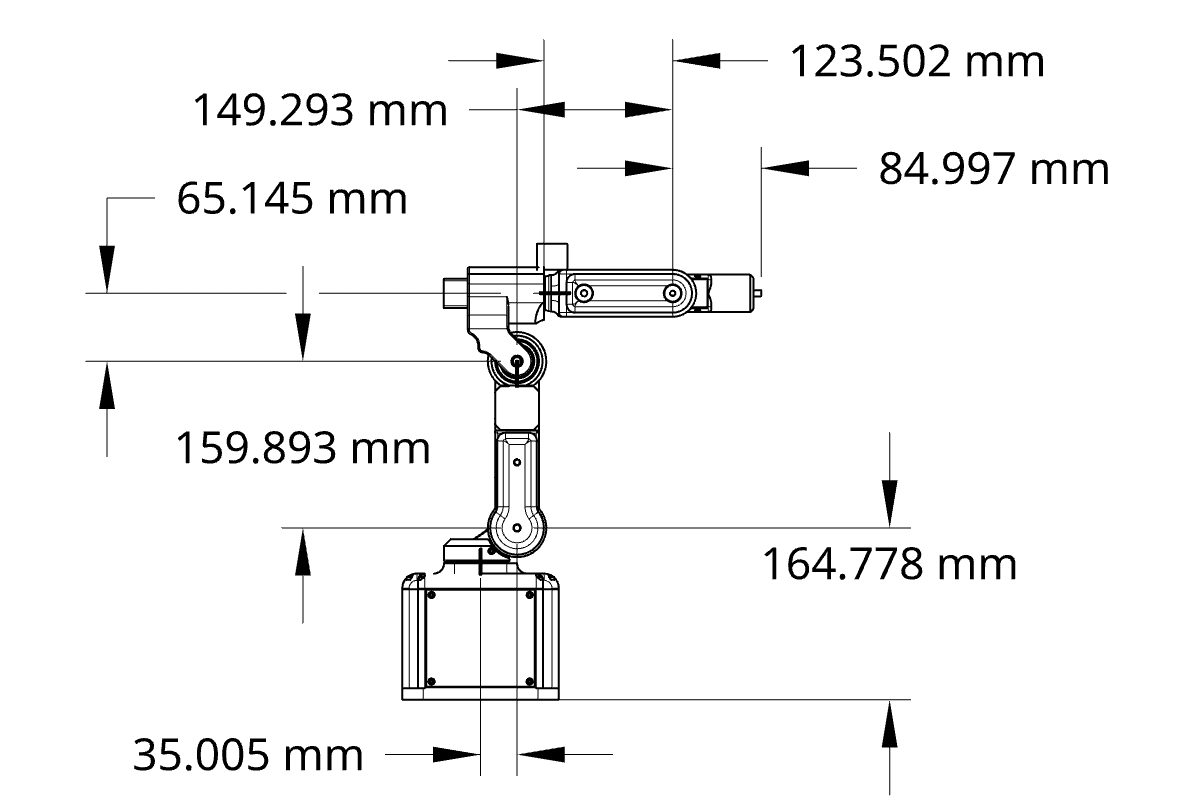
Please compare the pivot point entries in the MachineManager with your values again.
i have discovered that joint 2 is not correctly aligned, i will try to fix the file and sent it
Here are the fixed one
NKL Arm - J1.stl (5.1 MB)
NKL Arm - Base.stl (3.5 MB)
s, let me know if this works
is it possible with grblGru to mount laser or cnc spindle to the arm and engrave/cut things?
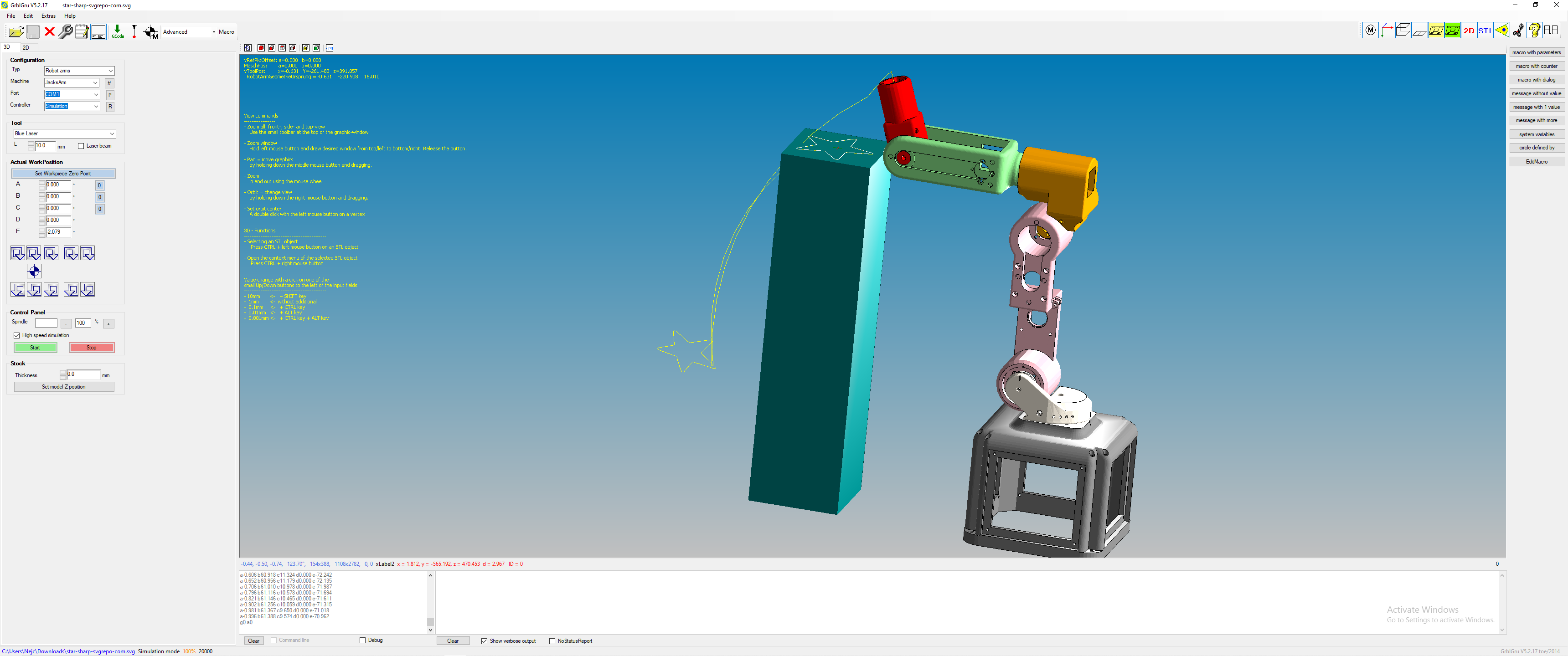
how can i move the position of the svg, so its not as high as the arm. i also tried projection but it just distorts its location and shape
Sorry, that looks like a bug of mine. ![]()
The error is also with the other robot arms. I’m afraid I’ll have to put you off.
I’ll have to look into it, but unfortunately I have very little time at the moment.
I’ll let you know here when I’ve found something.
Ok, thank you, but can you tell me what did you do that the error went away when you imported stl files of the arm?