So I want to buy my first 3d printer, I know that this is going to be important in my prototyping going forward so I know that I want a middle to middle high end reprap printer (500-1000 cost) that can handle just about any plastic. So any prusa or similar kits that anyone can recommend or just awesome tutorials, I have a lot of random steel, and electronic components including stepper motors so I might have what I need, but I’m not dead set on anything other than flexibility, cost in the 500-1k area (I mean cheaper is fine if it’s still a solid build but no more than 1k), and being able to replicate parts for other printers for myself and other people who need them.
I also have been playing with a kinect and my cell phone and nothing seems to really get at what I want. Which is, I want to put an object on a turn table, and have the camera or laser or what not move up and down in as close to a sphere as possible as the object turns and have software interpolate the pictures into one big model. And I don’t even know where to start building such a thing. I’ve found the off the shelf stuff really wanting when it comes to the kinect and just a cellphone.
I started with a kit, learned by improving it, bought another kit, learned by tearing it apart and turning it into a mostly self-designed scratch built, and last night tore apart my first printer for spare parts for my first completely-from-scratch design-build printer that’s getting close to finished.
If you really want to handle “just about any plastic” you need an enclosure and a high-temperature hotend. How big a printing area in each of the three dimensions? Do you have any specific requirements? Print size and quality will determine cost, basically.
@Eclsnowman, do you know what the BOM typically runs these days for building a #herculien?
I strongly recommend reading Mark Rehorst’s blog if you haven’t already. He has gone into great detail on multiple builds, and is active on the reprap forums as the_digital_dentist. I’ve learned a lot from thoughtfully reading his blog posts.
SecKit might be the kit manufacturer that most closely follows Mark Rehorst’s design principles. However, the SecKit SK-Go used to offer a 6mm cast tool plate bed but gave up and moved to probing, which is sad because one of the real keys to quality prints is a good flat bed that doesn’t warp when heated, as Dr. Rehorst describes. It seems the seller is confused about how cast toolplate flatness specs work. (He mentions 0.4mm variance, but that’s a max across the entire casting width of I think 4m; local variance on a hotbed-size piece is typically immaterial.) The SK-300/SK-600 exceeds your price range by a little.
Have you been using photogrammetry apps for your scanning? I don’t know if anyone currently active here has been playing with photogrammetry but in any case would suggest starting a separate thread for photogrammetry questions.
You know I haven’t gone back through the bill of materials in so long on HercuLien. A lot of the sites in my bill of materials are not updated links anymore. In fact I think I used the Google URL shortener for several of them to try and make the links not so long and I’m not sure that Google URL shortener even works anymore. But unfortunately I don’t think you’d be able to build HercuLien inside that budget range unless you are really crafty. Also I designed it so long ago that there are many things that I would probably change on it if I went and redesigned it from scratch now. I’d probably do an active three lead screw leveling instead of two leads with a belt coupling. Ideally you’d use 3-point leveling and a contact probe (three points define a plane). Because even the most stable kinematic mount with cast plate is subject to different thermal expansion at different heat bed temperatures. So a contact base probe takes care of that, and allows you to switch bed materials from PEI spring steel to glass etc depending upon the filament that’s going to be used. Something like the Railcore or Muldex setup.
The other tricky thing about a crossrod gantry like Ultimaker, HercuLien, and Eustathios is since several of the rods act for both rotation and translation, it requires bushings not bearings. So the stack tolerance of the entire gantry can be problematic for some. I’ve never had a problem getting alignment, but that was probably the single biggest thing I had to provide support for on my design back in the Google+ days. You have to have pretty exacting assembly, printed parts, and frame fitment otherwise you’ll run into binding issues.
Currently the printer that has me the most excited is the Muldex. The design and attention to detail is just amazing, and having dual independent extruder on corexy is quite an accomplishment. That’s not to say coreXY doesn’t have potential issues. Differences in belt tightening, frame squareness, etc can cause issues with circles being more like squircles.
This is a bit long and rambling, But what I will say is that every time I tried to build a printer for cheaper than a kit, I ended up losing that battle. I’ve designed many printers over the years now and never has my self-sourced one ever been a cost savings. But each printer I designed was for a specific purpose and I think normally I fulfilled that goal because I could make each printer do exactly the things that I wanted to knowing the limitations of each style of design. Every printer design is good at some things and worse at others.
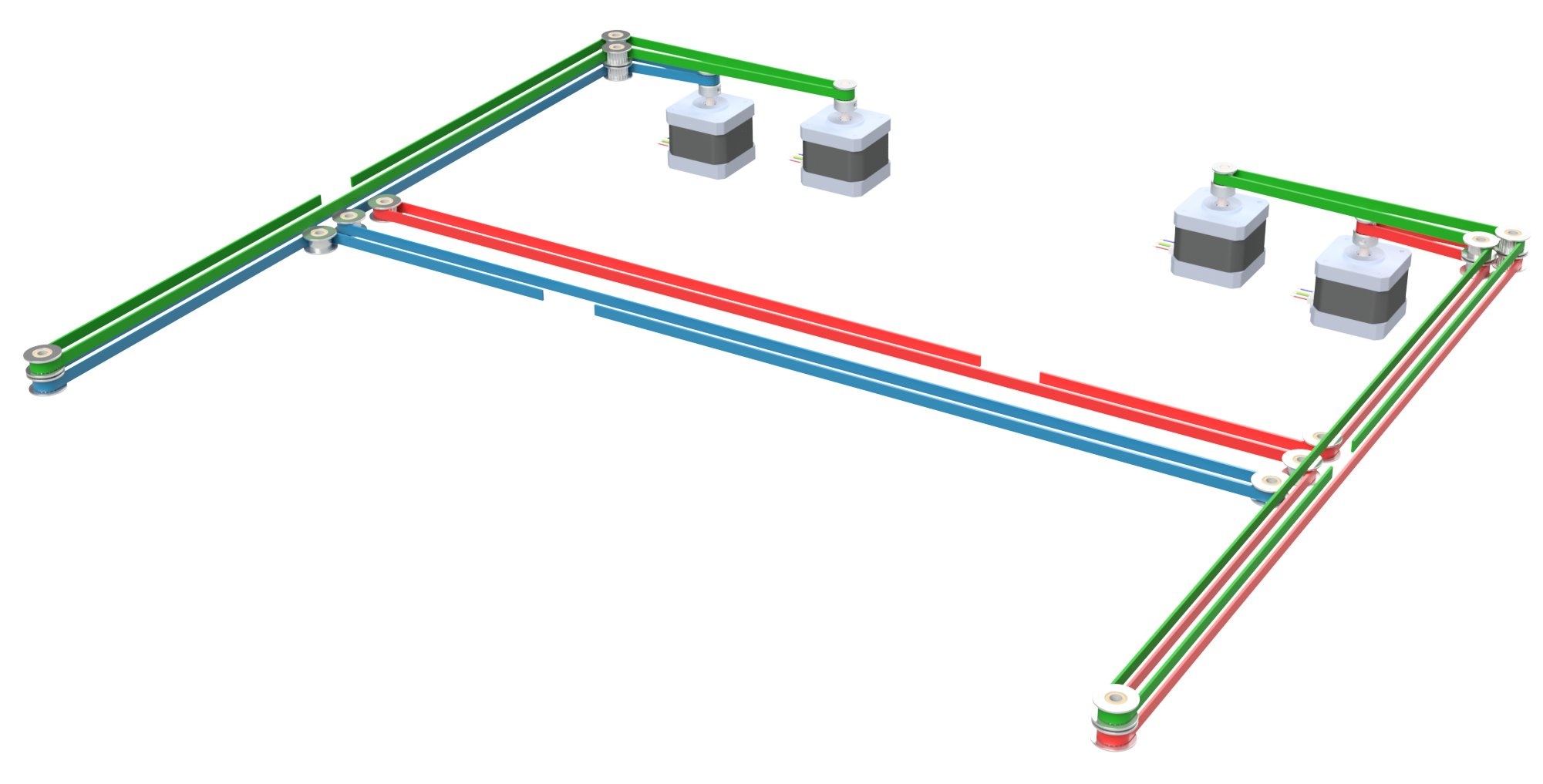
Sorry, I guess I was wrong about the CorexY. It is Dual Y Motors, single X Motor for each independant. But the X has to work in tandum with the Y to maintain posistion so it acts alot like CoreXY. This was my mistake but I found a good picture of his belt path setup:
Yeah, lots of similarities. I agree that this is a very interesting design, and I like his ooze blocker idea too. I doubt Muldex will fit under the $1K price point all-in once he releases it, though!
That part I don’t follow. The whole point of cast plate is that it should not have internal stresses or anisotropy that would cause any variation in flatness at different temperatures.
What I mean is the thickness of the plate and length of the hotend will be different at 55C/200C compared to 110C/260C. Higher temps will cause more thermal expansion, and in my experience may at least require a different offset which could be done via slicer start gcodes… but I have had such good luck with my BLtouch (and even BLTouch clones) recently that I double I will ever go back. I totally agree that mechanical robustness is a key starting point, but not allowing yourself the benefit of software compensation for even higher ease of use can be a little dogmatic. Modern CNC’s use probing and cutter compensation not for cheating, but to improve ease of use.
On my Eustathios and HercuLien I never had to re-level between prints. They were rock stable, but I did at least have to babystep my offset when dramatically changing my temps between profiles. And on my Ender3 with a non-flat bed the BLTouch has been a lifesaver. I have both a glass sheet for TPU and other materials, and a spring steel PEI for general materials. It sure is nice to just hit print and have the first layer be butter smooth on every print without even having to think about it.
I’ve heard good things about the Pegasus v2 does anyone have any experience with this model? I’ve also been told that I need to upgrade it to get the best out of it, what are the most commonly upgraded things on this or any other printer? Extruder heads? Stepper motors? As for print area 8x8 would probably get what I need but 12x12 would be better. I’ve messed with a few photogrammetry apps already but I haven’t gotten anything like decent results, but that might be my technique as much as anything. Does anyone have favorites for windows or android? I will go check out Mark’s blog.
We have a saying in software development: “Plan to throw the first one away, you will anyway.”
I know nothing about that particular gantry printer. What you upgrade depends a lot on what limitations you run into in practice. Steppers are rarely the first upgrade.