Using a Openbuilds ACRO with a 40w c02 laser and a XPro controller I cannot get the machine to go around curves when moving quickly (>2000mm/min) it’s like the gcode is breaking it up into a ton of tiny lines which causes the controller or software to fall flat on its face. Is this normal? What can I do to fix this?
In LW use the field segment an input a 0.5 to start with. Look that the shape it’s not morphed. That should fix your issue.
BTW would love to see that setup
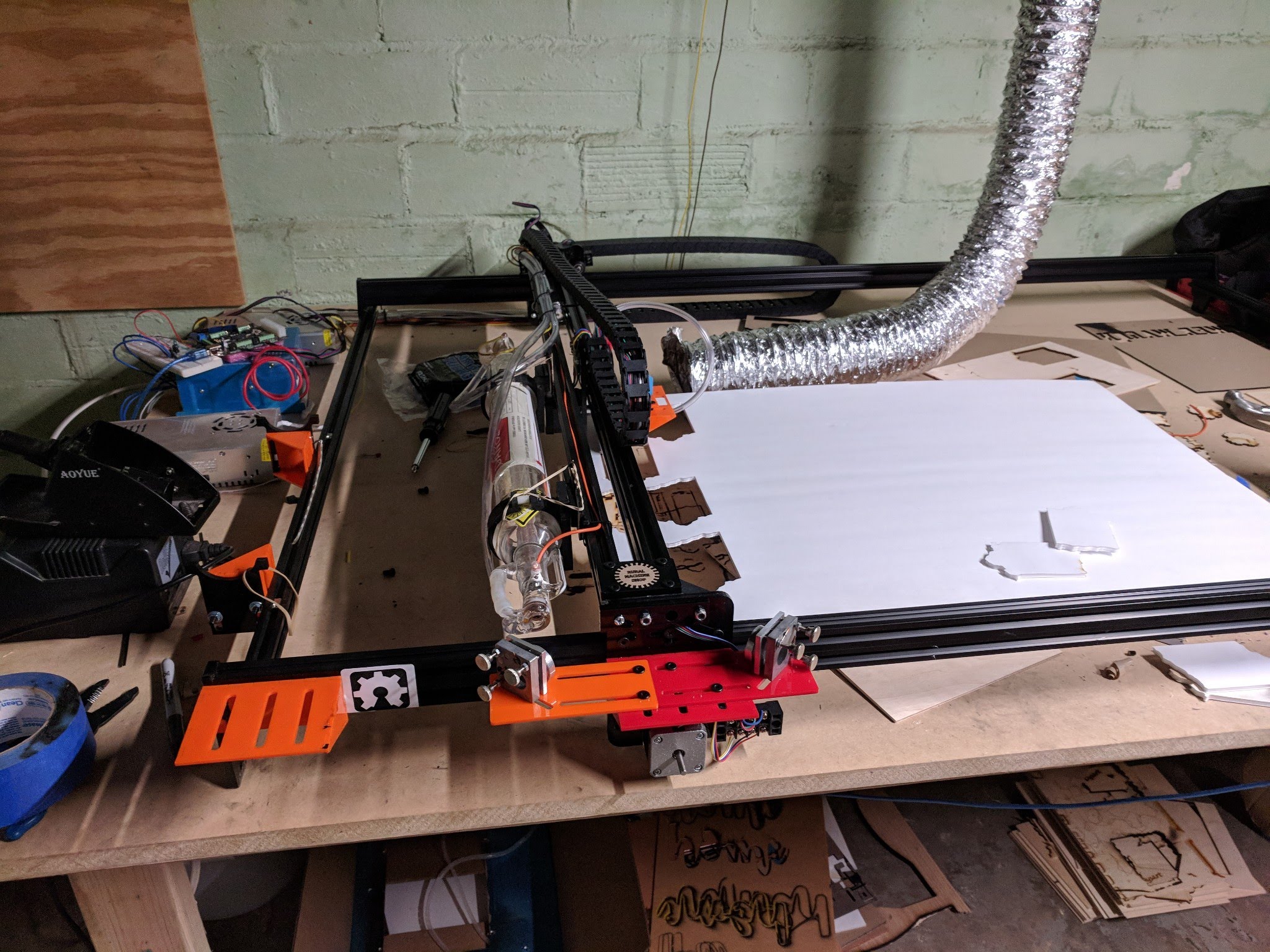
@Joe_Ternus so you added another profile on X and ride the tube on it. Been thinking about this for a while.
Yeap. Eliminates the need to align the first mirror! So much easier then having to deal with 1.5m of alignment
It’s on openbuilds under k40 acro conversion. That doesn’t have the gantry plates though. Adding those soon
still seems like a really long run on the HV line, and I would aim the tube at the wall rather then the room (and possible ppl)in case the worst happens 
You haven’t had any leaks from the water tubes either? and have you noticed and reduced flow of water(in liters/min) from the length of them? what size pump? Im sure many of us are curious also  looking good though!
looking good though!
Haven’t run into any issues yet. Standard k40 pump. I point the tube this direction as I was more confident that it would hit the first mirror in the ~2" of space it travels rather than the last mirror be perfectly aligned and missing the laser head. Soon enough there will be an enclosure and this won’t been issue.
@Joe_Ternus you can create your own operations presets with this value. This should not be a default in the software as not all cad produced this small sections when exported
@Joe_Ternus I have wondered about the reliability of running long HV wire for some time. Most HV wire is pretty stiff. If that becomes a problem there are silicon types used for car spark plugs.
Are you running the HV wire with other wires in the drag chain?
@Joe_Ternus it’s surprising that you are not getting HV crosstalk and sending the controller bezerk. If it arcs it can destroy most electronics.
@donkjr yea, now that you mention it a second drag chain wouldn’t be a bad idea. Maybe even on the other side of the machine. I’ll look into that
@Ariel_Yahni_UniKpty Looks a bit like how it’s done in the FABkit… They too use a chain to guide HV wire and water tubes…
Perhaps @FabCreator (@Bonne Wilce)is willing to share some details about the wiring they’ve used?
We use the standard HV that comes with our PSU, but we dont use the k40 psu so dont know if there are differences in quality of cable.
HV cable will be stiffer than most cable so its important to have a larger radius on the cable chain so the water tubes and HV wire are not under a lot of stress. Your cable chain looks to be quite tight but as you dont have much z height a larger chain would not be easy to add unless you flip it and put it on the xy axis like some 3D printers do for the filament path. Cube x
I believe openbulds acro uses either smoothie or grbl, not 100% sure, however I know smoothie has the option to divide lines and curves into smaller segments if its creating to many lines the controller can no longer buffer at the speed you want to move and will begin to stutter. what @Ariel_Yahni_UniKpty said  but i think should be able to chain it in the firmware permanently?
but i think should be able to chain it in the firmware permanently?