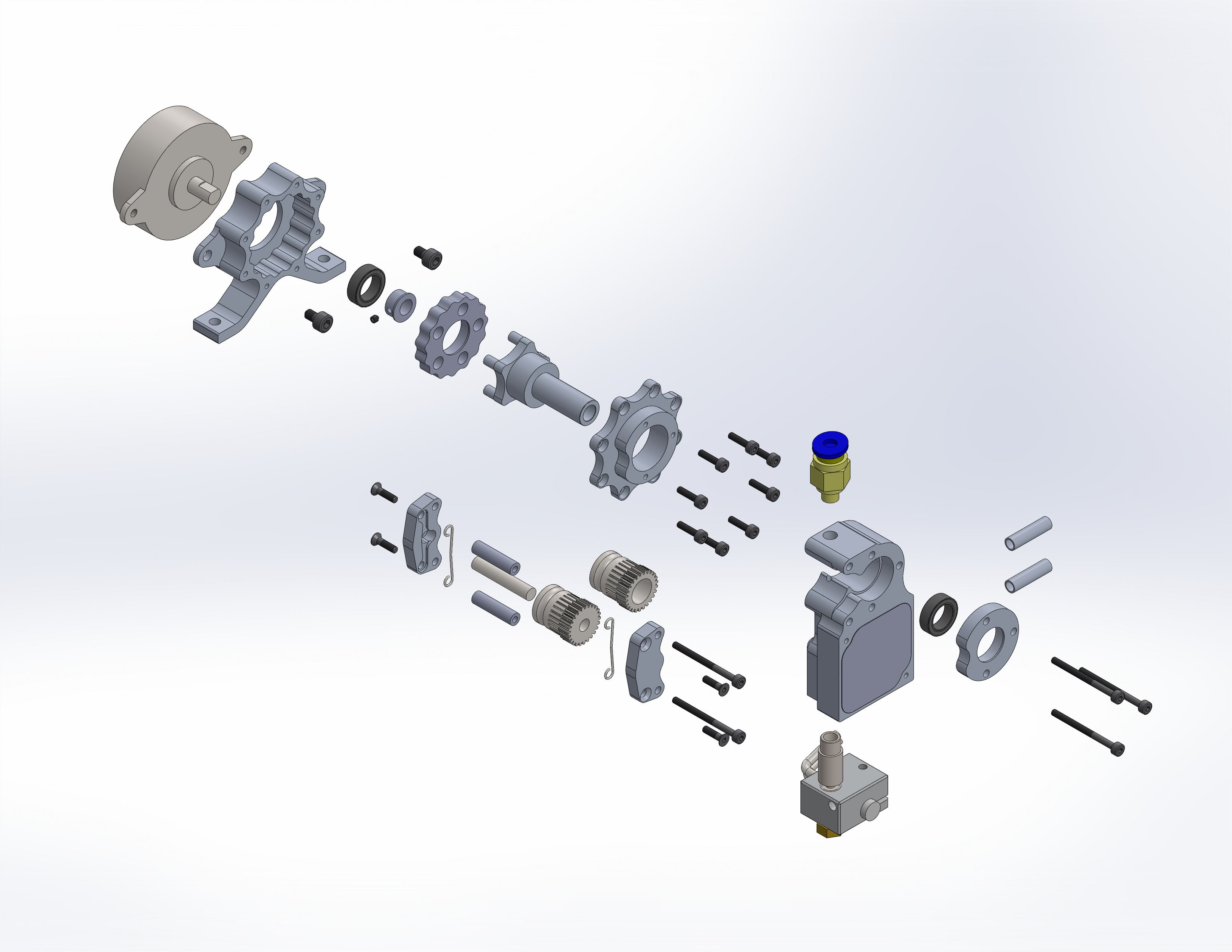
I have been making a direct drive extruder driven by a pancake NEMA14 with cycloidal gearbox, as inspired by http://reprap.org/wiki/CycloidalExtruderDrive. In the end the attempt only half succeeded but I thought I would document my attempt for the benefit of others.
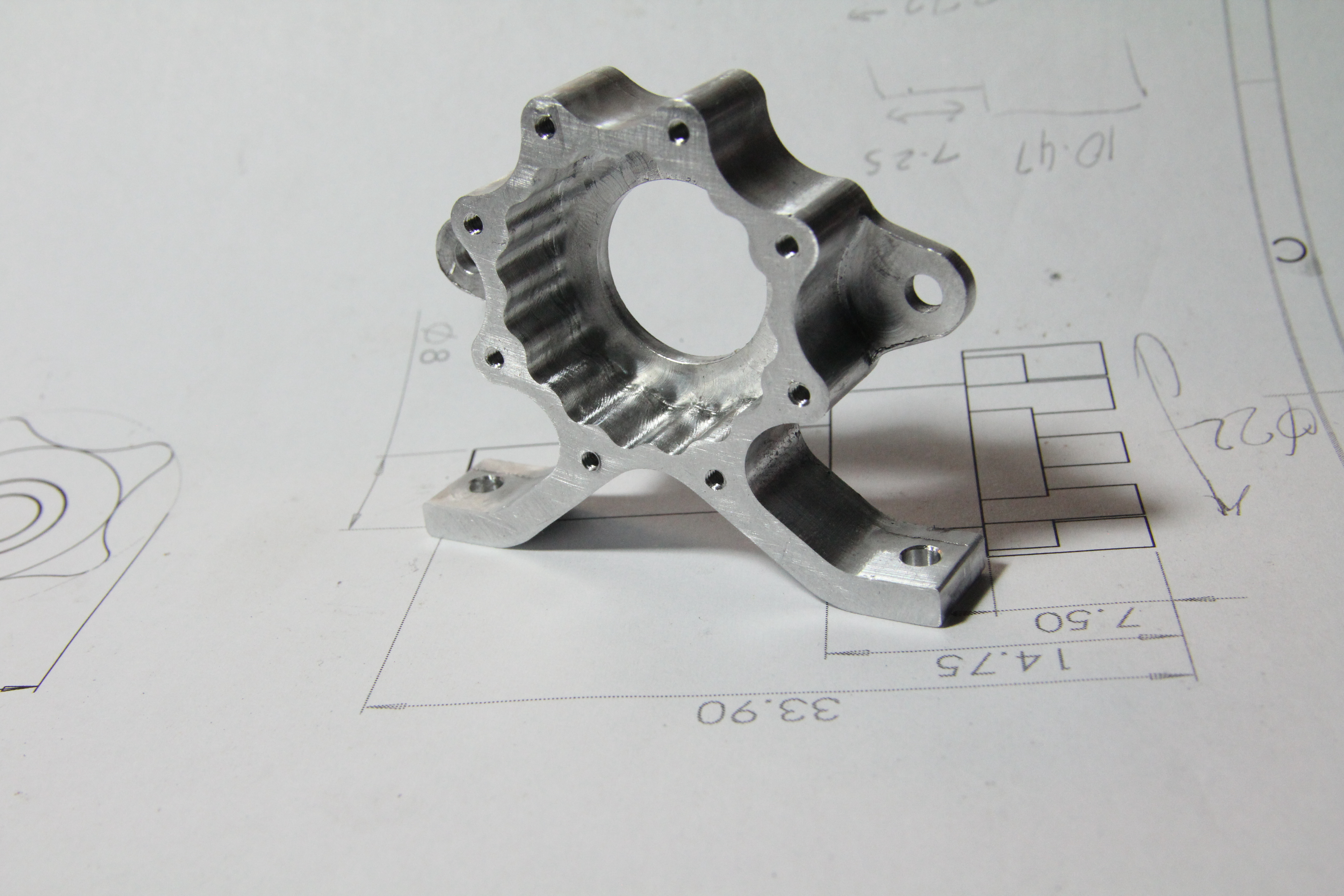
Key details are that this was machined out of aluminium for the frame and polyethylene (kitchen cutting board) for the eccentric gear on my CNC router. The filament drive gears are taken from a Bondtech QR 1.75 and so I have dual drive on the filament.
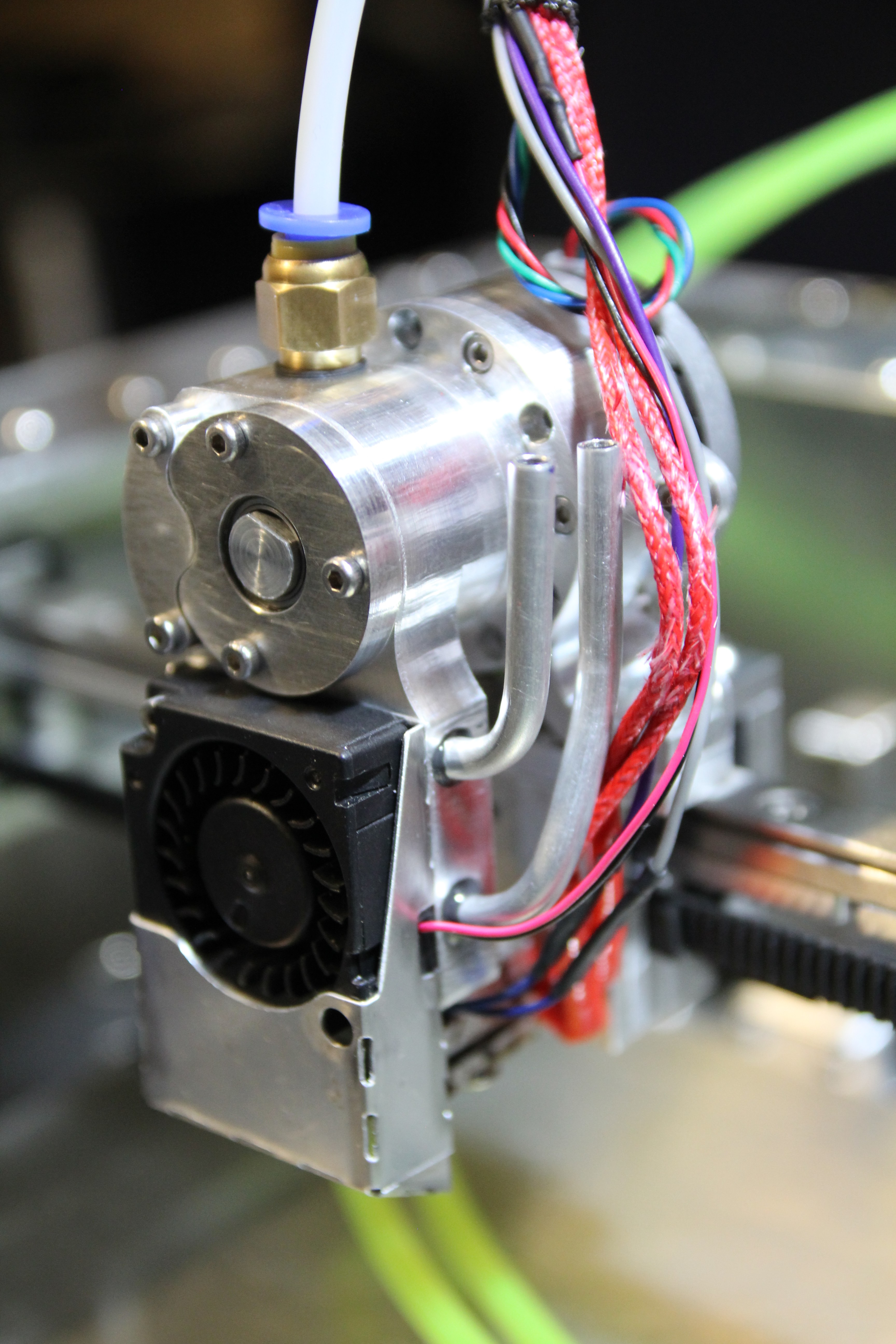
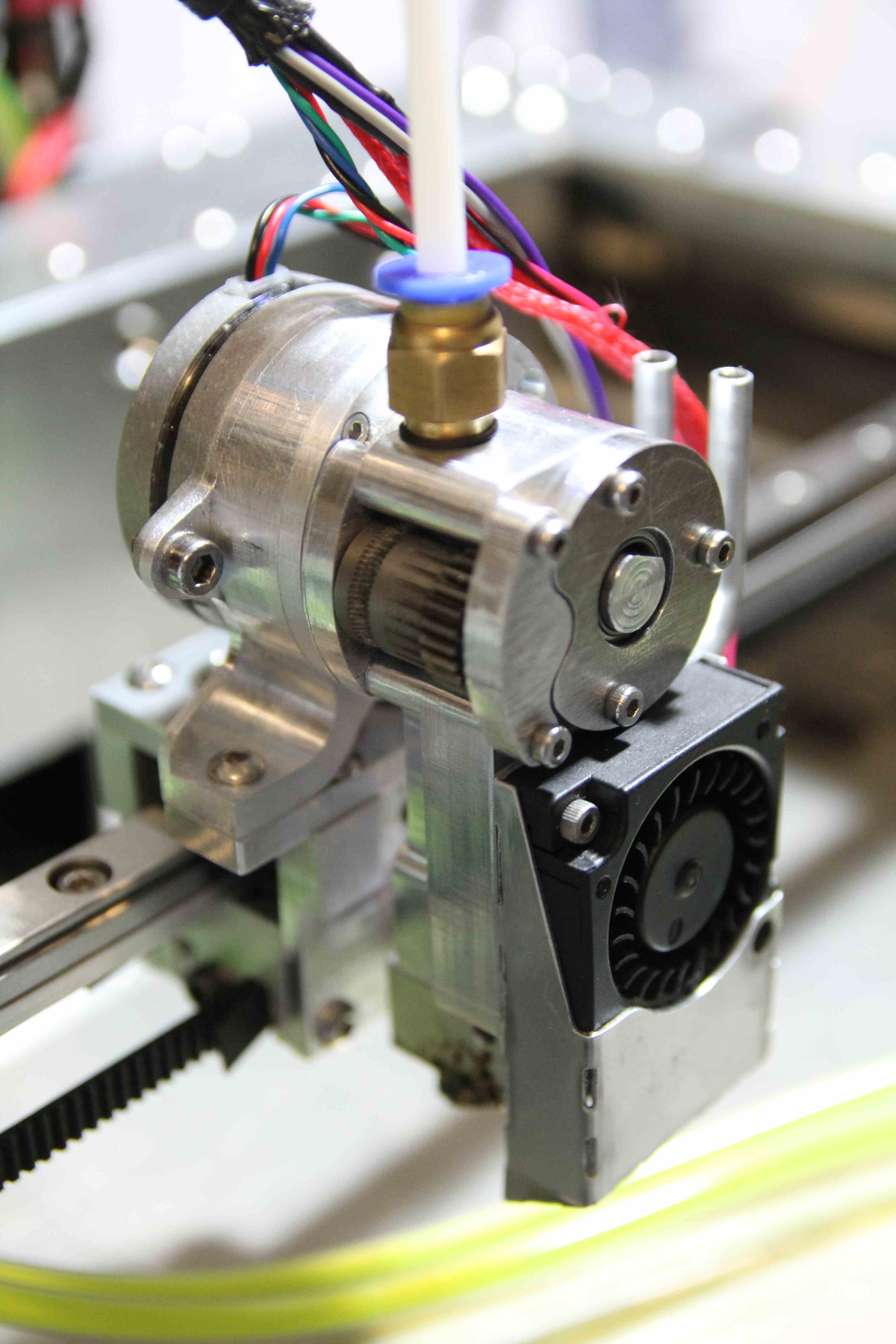
My first attempt is shown in the first two images and video below. This had a drive ratio of 10:1 with fixed secondary filament drive gear i.e. the filament drive gear axles are fixed relative to one another. This setup would succesfully drive filament about 80% of the time but would regularly stall. I attributed this to insufficient gear reduction and the inability of the drive system to accommodate filament that was either over size or deformed by previously passing through the drive system. This lead to attempt number two.
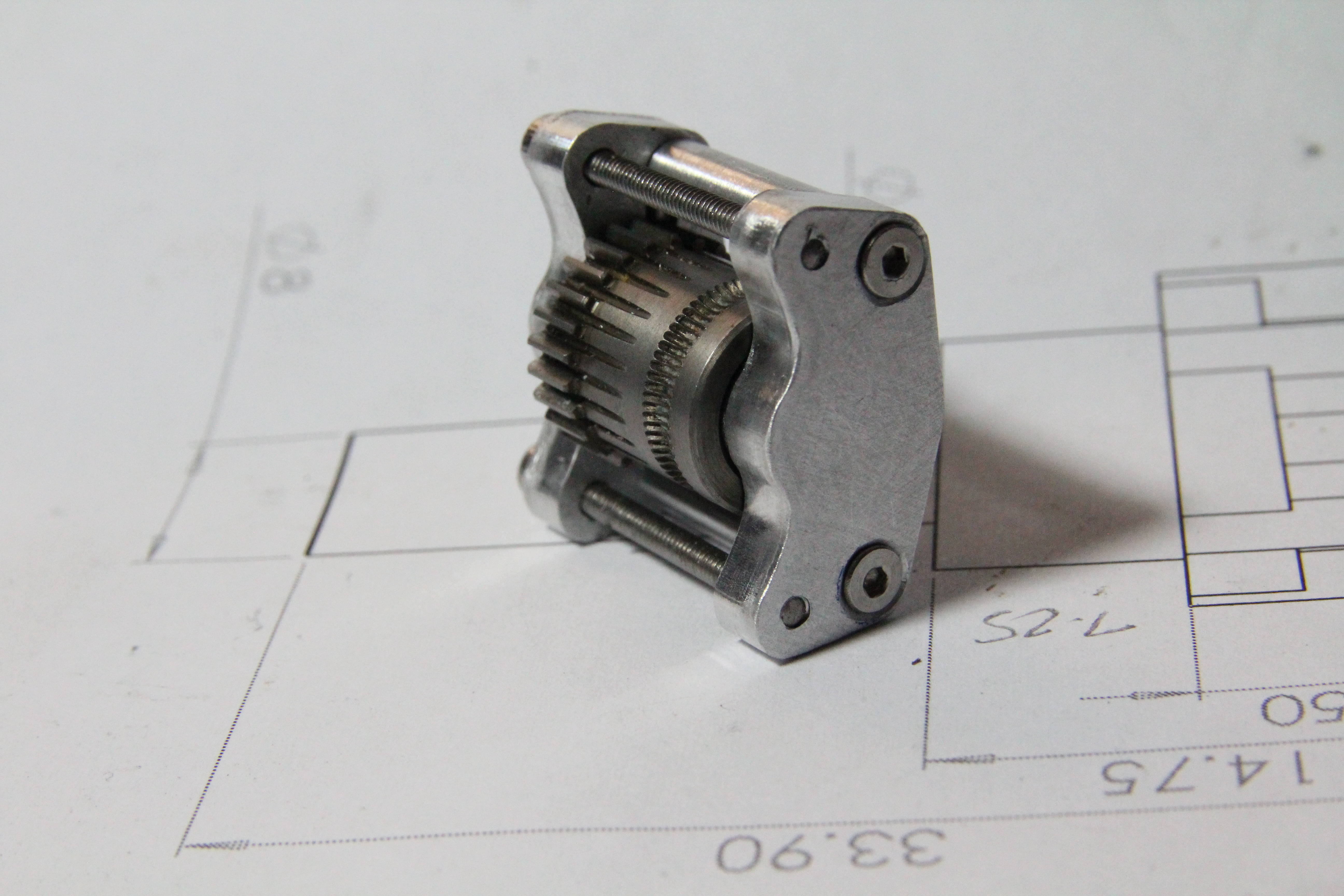
Attempt two had a reduction ratio of 15:1 and incorporated a spring loaded secondary filament drive gear. I also implemented some weight savings, hence the scalloped outer profile of the gear housing and other small changes (see remaining images). This approach seemed to work well with the unit having no trouble pushing filament. I then commenced printing test pieces and immediately noticed that I was getting inconsistent extrusion widths. This was due to non-constant rotation of the output shaft for constant input. After trying multiple courses of action to remedy the problem, mostly involving trying to make the eccentric gear and output shaft with varying tolerances and different designs, I came to the conclusion that with my facilities (+/- 0.05mm) I am unable to meet the tight tolerances required for making this system work.
Overall it was a heck of a lot of fun but I am now moving on to using a commercially available drive just so I can be done with the Bowden setup that I currently have.
Thanks for sharing, this is some neat design, and we desperately need more people to post less-than-successful efforts for group learning rather than only the stuff that works.
Wow, very nice! Is the non-constant output a result of using the hypocycloid gearing method, or was it a result of sloppiness in the tolerances of the machining? Gearboxes like this with lightweight steppers would be amazing for things like delta machines which need a low end effector mass, but suffer from basically always having to be run by a bowden tube of some sort.
Great machining & well integrated cooling system!
Some of the non-constant output may be related to cycling deflections from using just one wobble gear. Industrial gearboxes use at least 2 opposite ones, creating compensating radial forces. The double eccentric needed is more difficult to machine, but it’s worth it…
@ThantiK I believe it is from the tolerances, mathematically there should be constant output from this design. So my non-ideal implementation is to blame.
@Heinrich_Wiedemann_p I went with only the single wobble gear believing that the reason was primarily for vibration elimination. As you say it appears that the double gear is also needed for other reasons! Adding another gear will require a redesign so it may or may not happen, time is such a finite resource.
@Ryan_Carlyle this is precisely why I posted. It is a problem in most areas that people only want to talk about the successes. I work in research (plasma dynamics) and and it is a crying shame that most of the work that people do is not a glowing success and thus never gets shared outside of their immediate group.
Ive been experimenting w a dual strain wave gear and a NEMA 17. I designed a somewhat large one but smaller than the one in this inspirational video series… no luck yet but it’s close. Spent a whole evening on it and part of the next day. Fun stuff! I have lots of timing belt loops
I’m impressed with the work that went into it and I wish the results had been better for you. If the tolerances really do need to be so tight then it’s unfortunately not practical.