Busy in the Jungle with TinyG2 - 6Axis - Workspace
Still Work In Progress - but wanted to share with you all now things are starting to work.
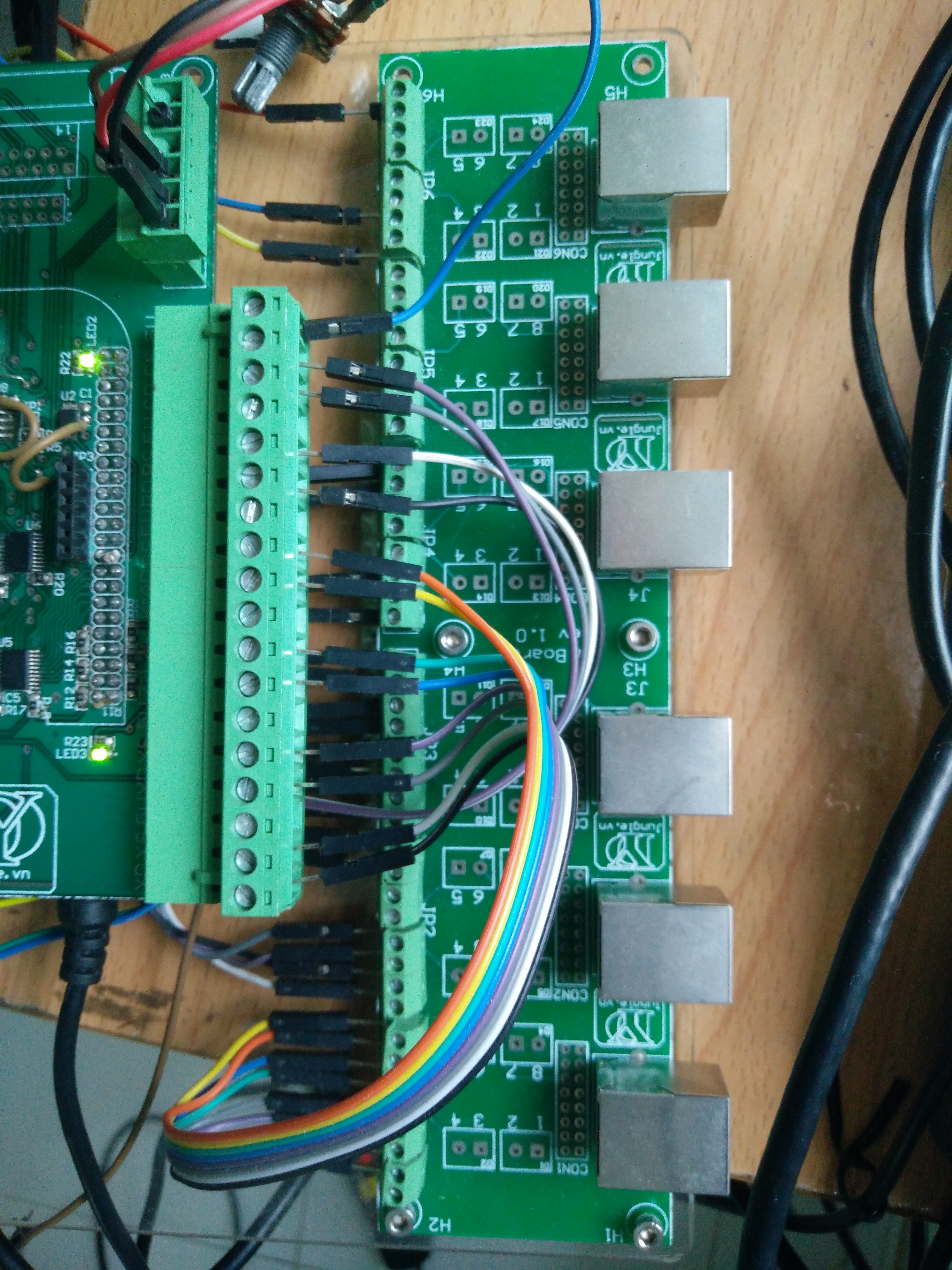
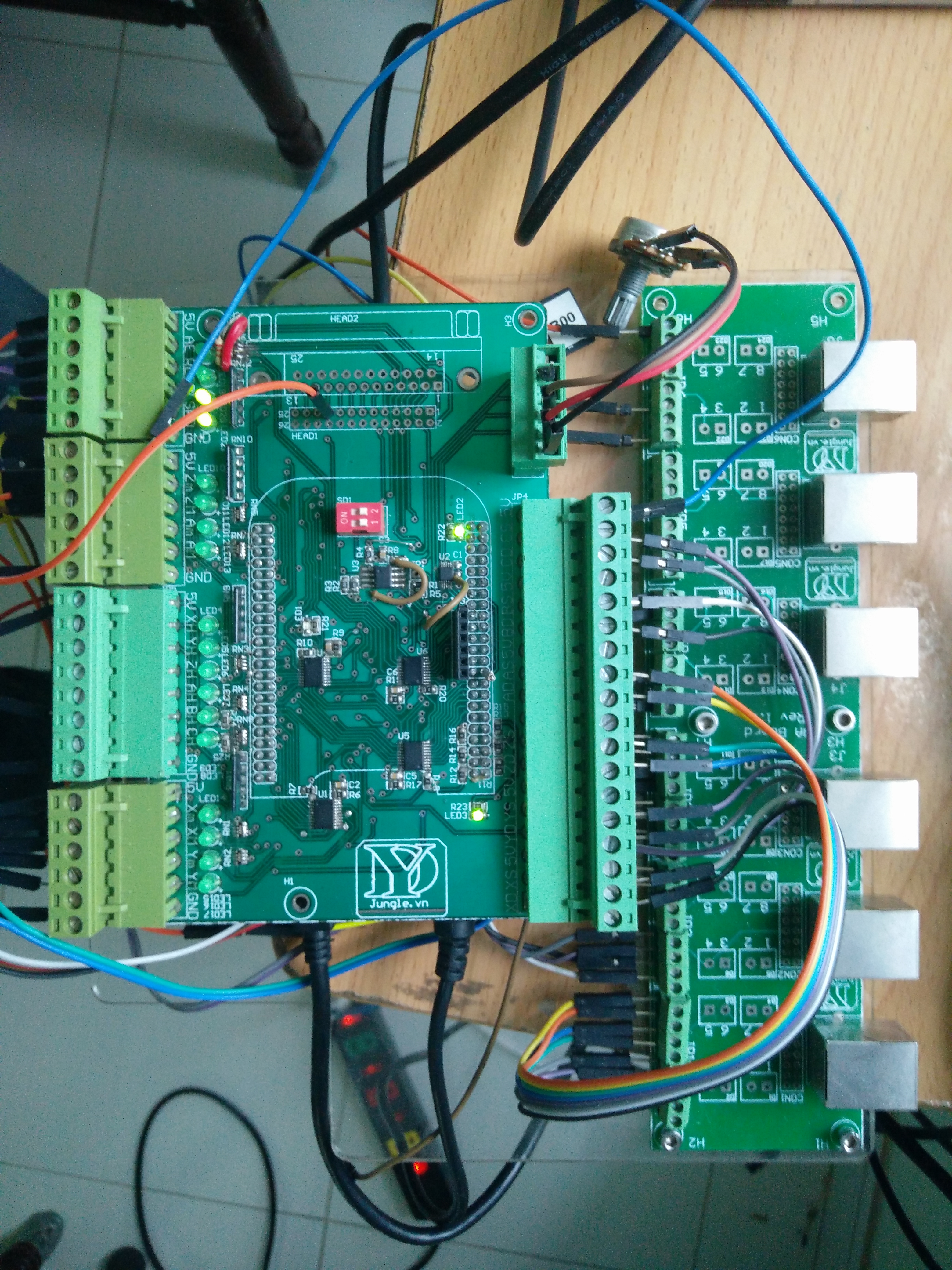
I have made an adapter/Shield interface for the DUE running TingyG2 running flat out 6-axis, Spindle, OnBoard ROM, EndStops, Industrial quality Connectors, and 3DPrint Support also. Still lots of work to do but really cool to see it all starting to work.
Next Big step is get ChiliPeppr to show the Rotary tool Path, and to build a Handheld Pendant.
This is looking pretty awesome. What’s interesting is I needed a rotary axis last night with ChiliPeppr so it sure would be cool to have you make some changes to ChiliPeppr to show us how it’s done.
Well, one idea is that if you want to use a 4th axis, you could design your Gcode as an XYZ layout, but then map the X or Y axis to the A axis. I needed to do it to etch some text around a brass pipe. Wasn’t sure of the best way to do it, but this rotational mapping idea was one thing I thought that could be simple.
Used meshcam solidcam and rhinocam to produce 5axis gcode there seems to be many ways to impliment it depending on how machine has been built slave is easy as it is more an inroll
So what exactly are we looking at? Step and Dir 5v out to external drivers? 5v for limit and homing too? I have only worked with TinyG but we have a rotary axis on the current build and I just mapped it to the y axis.
On the current version of the controller all external motor drivers are being used, and all signals are opt isolated and are TTL Levels (5V) In the current configuration there is no plans to put onboard drivers onto the board. If there is a demand I can add this feature. But Currently The Goal of the Controller is to allow the user to use TinyG2, LinuxCNC, and RepRap firmware.
I am working on a much bigger project requiring many axis some 14 in total and need the flexibility to switch between the firmware rapidly. In my case I am using mostly NEMA 34 steppers and 500W to 1KW Servos. This configuration is more expensive than onboard but gives total flexibility in the configuration of the target CNC machine.
The big goal is to get 3Dprinting, CNC Milling 5-6 Axis and Laser cutting and engraving running on the same hardware.
RepRap Firmware has been ported for the fun of it as I have also ported the TinyG2 Firmware to run also on the RepRap Board as well.
Currently the web interface is being worked on to send files to the machine as well.
If anyone has any features they would like to see please drop me a message and will do my best to roll it in for the community.
Much work is also being done to use Rhino and a plugin to cope with BIG 3D-Print files. Currently the 3D-Print files I am working with are HUGE like 20M x 10M x 5M (YES I said METERS) ALL Slicer programs free and paid Crash when trying to slice such a big Model.
Support is being designed at present to support 5 Print heads, CO2 Laser and BC Milling head with Auto ToolChange and speed Control.
I love it! That is a huge project for the TinyG dude. I’d love to see the beast you are making that needs 5 print heads.
I used to write printer drivers for Windows in the 90s and we did some big printers but that is big.
Our CNC builds and retrofits so far are a mix of 34s and 23s. I like the full servo drivers I’ve run and like the idea of closed loop using encoders for all movement. It looks like that tech is ripe for the mid size (full 4x8 and 5x5 plywood sheets) machines.
Is this something you are going to make available soon? I might be able to do some testing for mid size CNCs between builds.
I am a cnc noob, but have 25+ years on control systems of various types. Do you work alone, with a team, or allow outsiders in your projects?
Just starting my first cnc build, got a few NEMA 34s, bought a TinyG, and looking at building a inline driver to handle higher voltages and currents than the TinyG was designed for…