BigMoe
I hope no one get afended when I post here since this is the closest I get to a group that post builds that can in a way reflect what I’m trying to build, and I’ve been following the group for a while and getting ides, latest Hon Po’s build with spectra-line.
So I have been drawing and trying to figure out this concept for a while now, but got to ask if there are someone with a bit of experience with spectra-line drive for Z-axis who care to comment on my build to see if it’s doable or not?
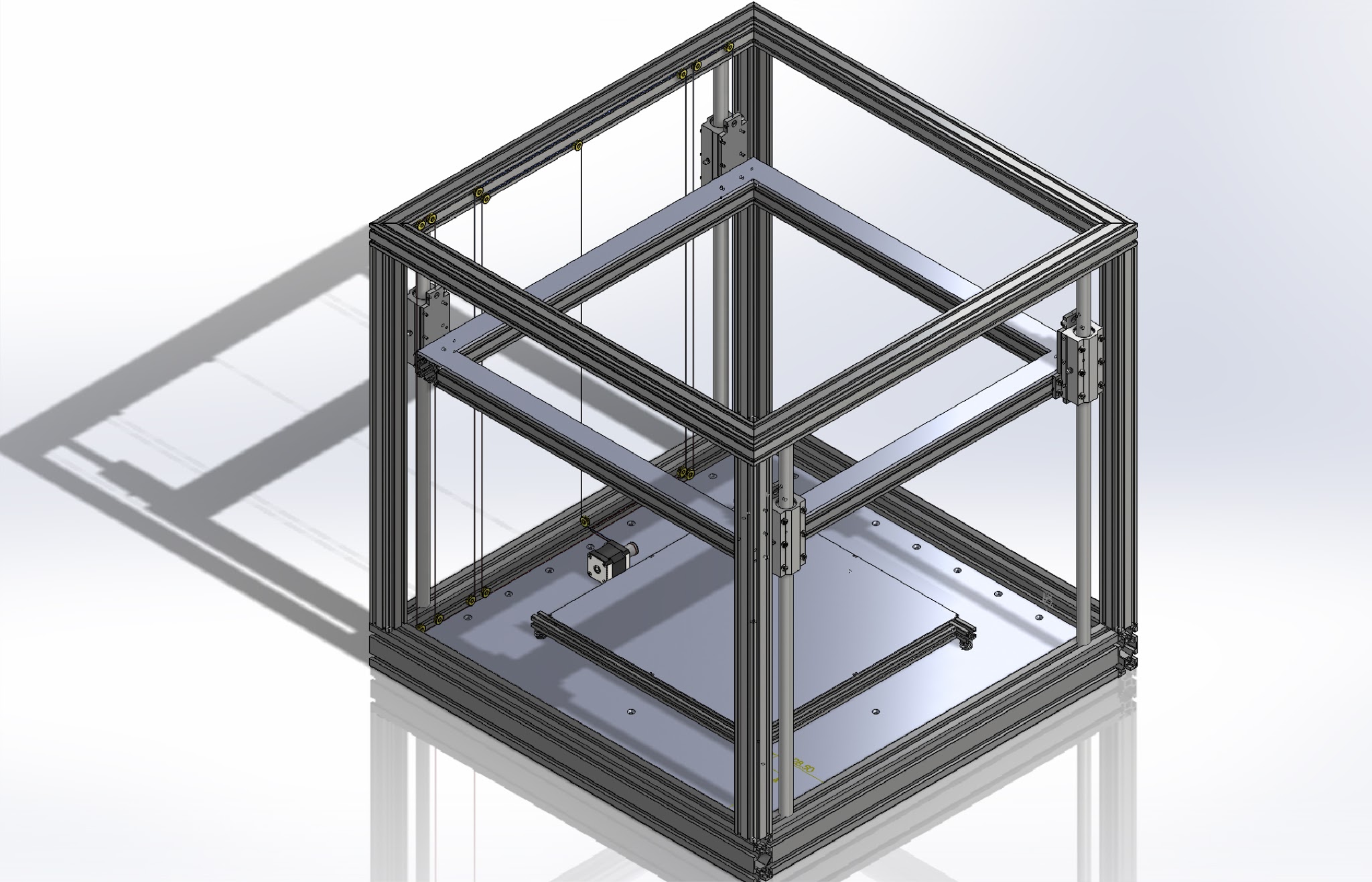
The cube is 800x800x800 mm with printable area like 400x400x400 mm. What I want to try is to let the printed object stay put and lift the gantry with spectra-line to get rid of all the Z-artifacts. I also want to drive the X and Y-axis on the gantry with spectra-line/belt, and if possible use a dual Bowden extruder.
First of all I see it might be a problem with firmware for the combo of spectra-line Z-drive and h-bot or core xy-drive, so I might have to do separate spectra-line drives for all axis, that should work as a regular cartesian setup with belts, I think?
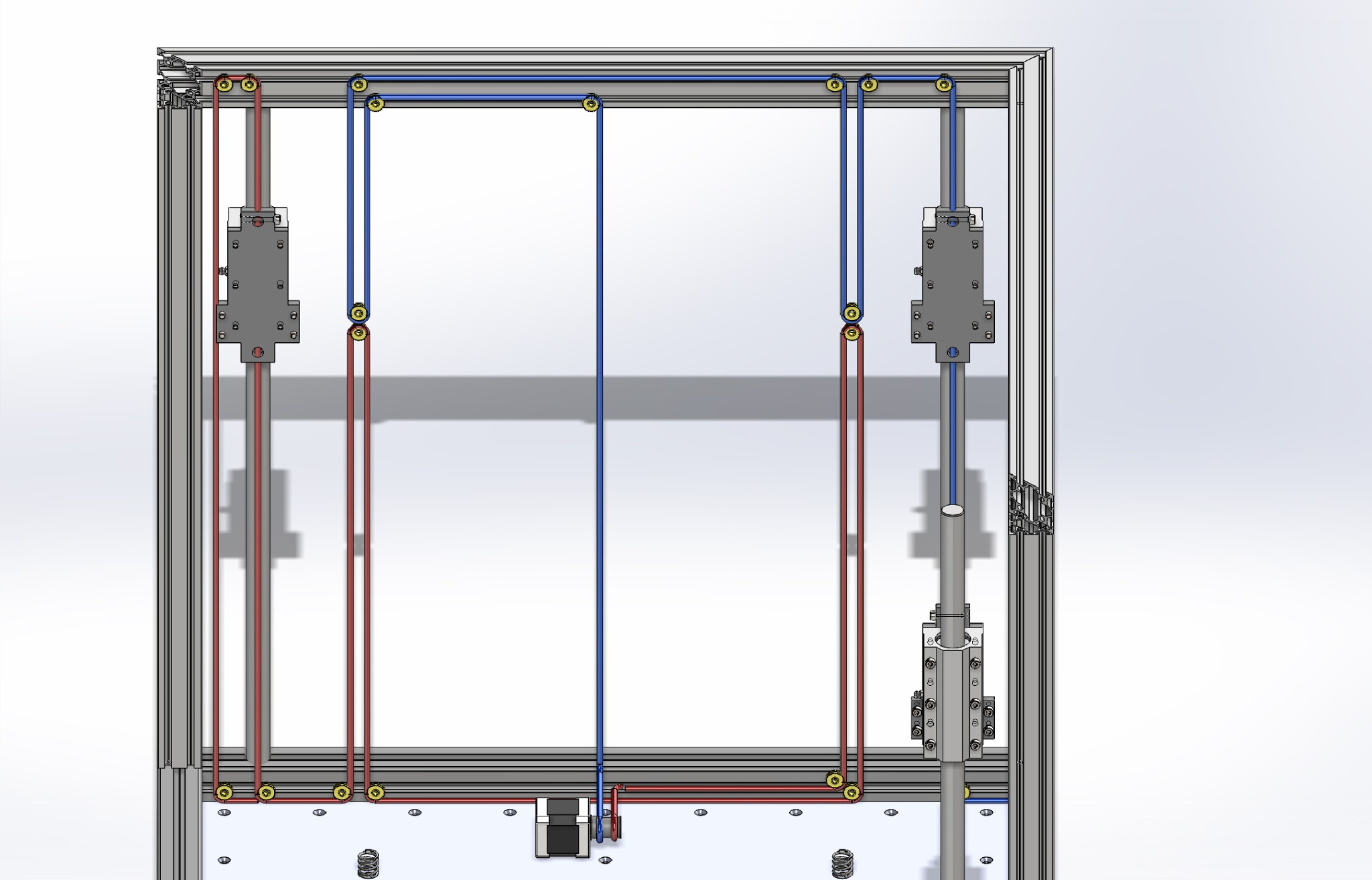
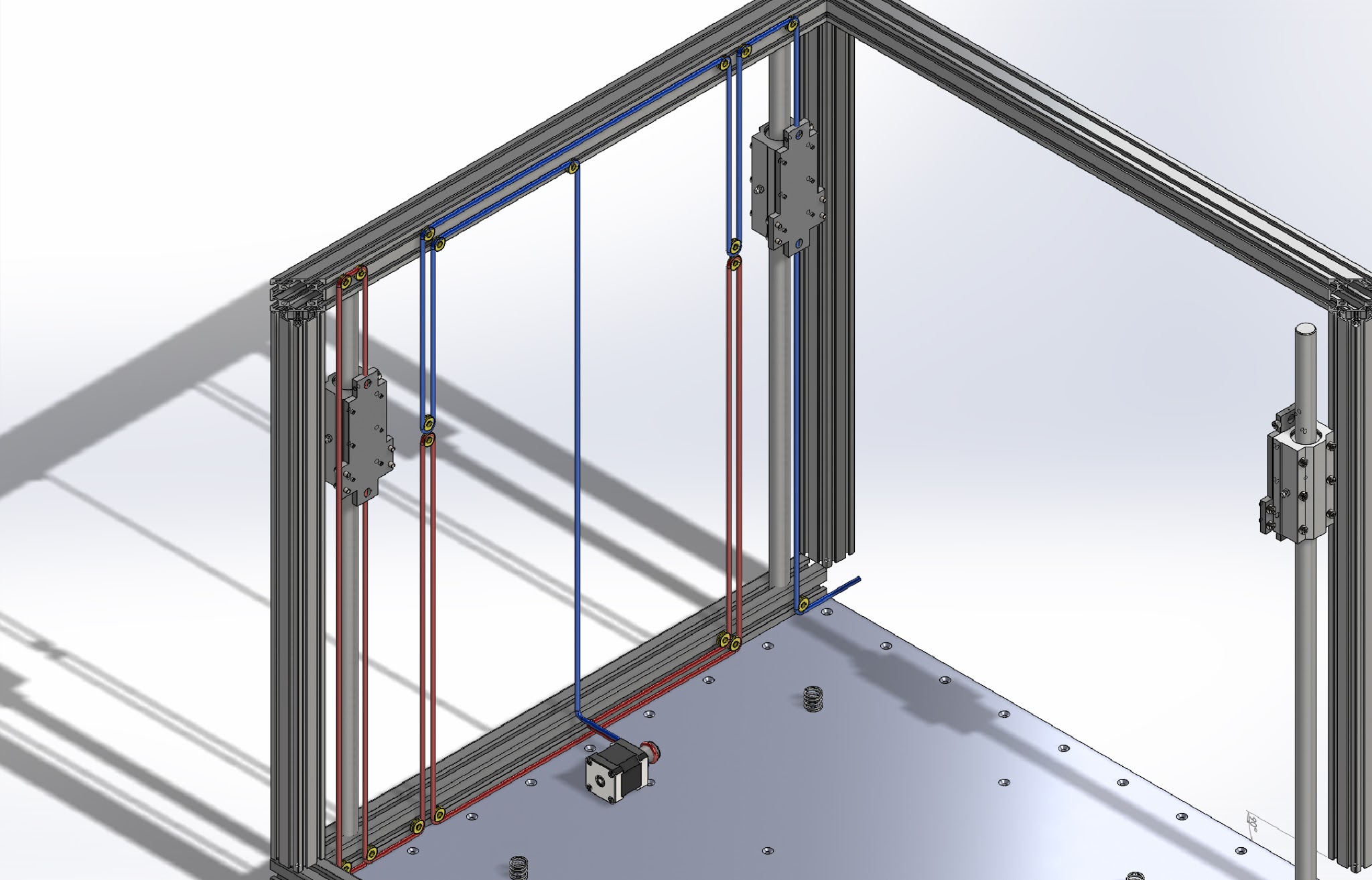
Secondly, I’m not sure I’ve had my head strait on when I tried to alter Nickolas Seward’s concept of a Z-driven axis. What I’ve been trying to do is make a pulley arrangement to help reduce the pulling force needed and even out the pulling over the with of the printer with four attachment points for lifting and lowering. Two directly on the linear bearing house, and two one the gantry.
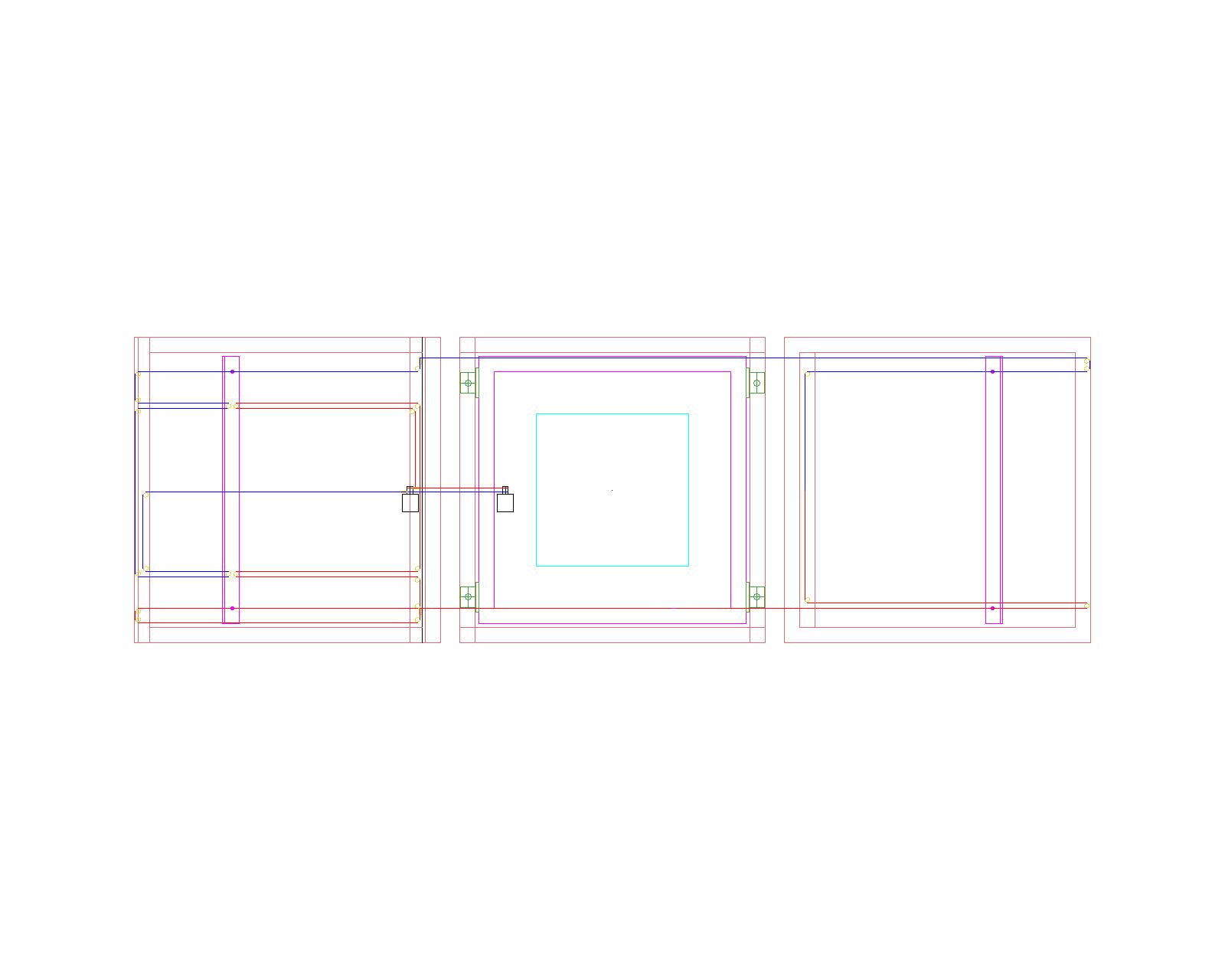
So if you look on the attached drawings I’ve dived the up and down motion in red and blue spectra-lines(beefed up to Ø 5mm just for the showing), and all the idlers in yellow. The four middle one attach to the gantry. It’s not showing yet, but both the outer lines go over to the right side, down under/ to the side of the print-bed. The last picture show the spectra-line layout, from left to bottom to the right side, the pink lines are the gantry I want to lift.
Regarding a dual Bowden setup, I’m a bit afraid the tubes might be a bit long and the pressure to high, approx +1 meter I would think.
All the extrusions are Misumi 40 x 40 mm, on the gantry with milled faces.
Terje