Anyone know what’s a safe maximum voltage for a Nema 17 stepper motor rated at 2.8V, 1.26A
Originally shared by Robert Wozniak
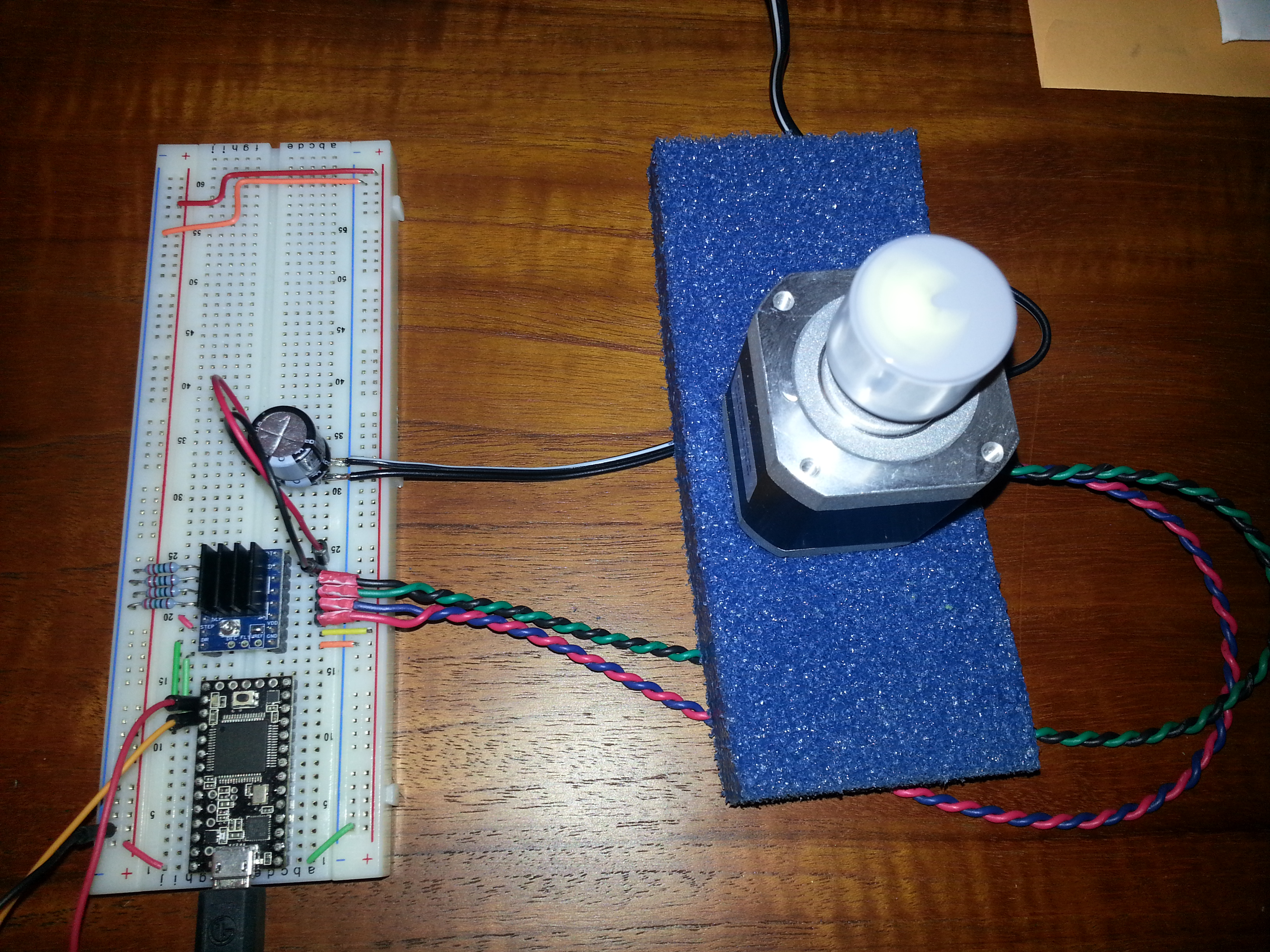
Having fun tonight with stepper motors.
I’m driving a NEMA17 Stepper motor with a Panucatt SureStepr SD8825 Stepper Driver all from a Teensy 3.0 running at 96 Mhz.
Running AccelStepper Library. I’m playing with all the parameters, but have been able to reach 3000 RPM.
Paul Stoffregen’s amazing Teensy 3.0:
http://www.pjrc.com/teensy/index.html
Panucatt SureStepr SD8825 Stepper Driver:
http://www.panucatt.com/product_p/sd8825.htm
KL17H247-168-4B Stepper motor :
http://www.automationtechnologiesinc.com/wp-content/uploads/downloads/2012/08/KL17H247-168-4A.pdf
AccelStepper Library:
http://www.airspayce.com/mikem/arduino/AccelStepper/classAccelStepper.html#af4d3818e691dad5dc518308796ccf154
These are my current settings:
Frequency: 10,000 steps/sec
Acceleration 750 steps/sec/sec
Pulse width 13 uSec
Current limit 650ma (power supply)
Drive voltage 18V
Dang!.. Power just went out
Hey man what kinda circuit board is that? I have been searching for one similar.
Heads up teensy3++ will be out very soon. It will have the same ARM processor with six ports. Paul is awesome.
I have been a big fan of the teensy2++.
@Johnathan_Breaux It’s called a solderless breadboard. There are lots of sources on the web for them
Oh and I swear, I didn’t knock the power out… and now my tablet battery is nearly dead.
@Eric_Rossman I will be one of the first in line to get one… and I agree Paul is awesome. Teensy 3.0* would be a phenomenal processor for a 3D printer controller.
The only truly safe voltage is zero.
Robert Wozniak, About your original question; Current is king, as long as you don’t exceed the motor’s rated current you should be fine. I am overdriving 12vdc (@1.25amps per phase) to my n17’s on my Mendel but have to actively (40mm fan) cool the motors or they will over temp. Been running cooled n17 motors for printing upto 200mm/sec for over a year. I was running my motor bus off an ATX supply 5v 1.25amps per phase before, and never had to cool the motors, but would loose steps at higher print speeds. My point is keep an eye on motor temp for sustained operation and pick a voltage that works for the output speed you desire.
I love to see any and all development around ARM processors, keep up the good work sir 
@Robert_Wozniak The maximum voltage is determined by your driver, not the motor. A bipolar stepper driver does active current limiting, so if your supply voltage is higher, the driver will just reduce the duty cycle.
The voltage rating of a stepper motor is just for convenience. The motor has a current rating (which is the current at which it will produce the rated torque), and a phase resistance. The voltage rating is the voltage that will produce the rated current given the phase resistance, but to actually drive the motor well, you need to be able to exceed that voltage to overcome phase inductance (the opposing voltage produced by the motor acting as a generator when it moves). When the motor is still and the driver is set for the rated current, the average voltage will equal the rated voltage, but when the motor moves, the driver spikes the voltage higher, so it should be running at less than 100% duty cycle when holding position. My rule of thumb is that your supply voltage should be 3-5x the motor’s voltage rating.
There’s a good white-paper on the geckodrive website that explains these things.
http://www.geckodrive.com/
@Anders_Wallin
Thanks for that Link…excellent primer and full of good information that I once knew and have since forgotten!
@Eric_Rossman @Whosa_whatsis
Thanks for the info. I’ve since figured out the Panucatt current settings, Current Ref, and am monitoring phase current, and have been playing with synching two motors.
Just as a goal, I’m trying to see how fast I can reliably step the motors. Bit banging the Teensy, Ive ben able to maintain control at over 15,000 steps/sec in single step mode (4500 RPM)… Still have lots of parameters to play with. I posted a video here: