This is a post I’m waiting to do for a VERY long time… really a very long time… I’m actually embarrassed about how long it took to take this project to a presentable state…
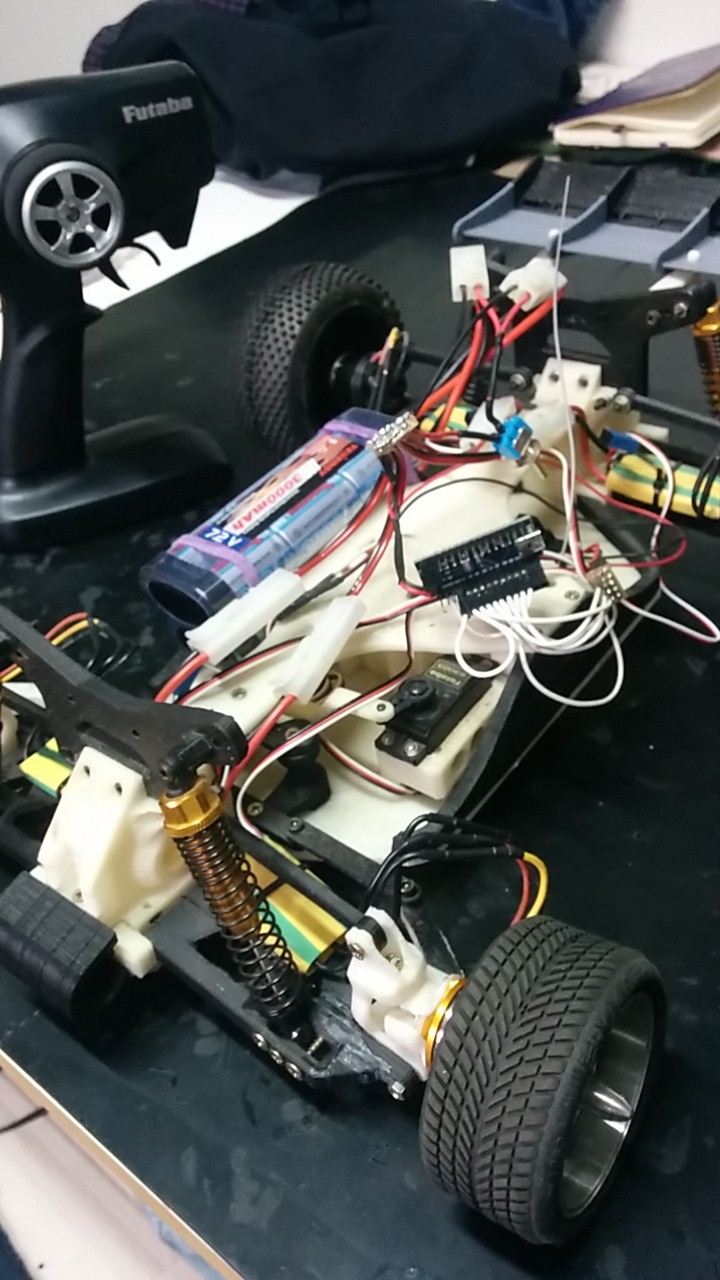
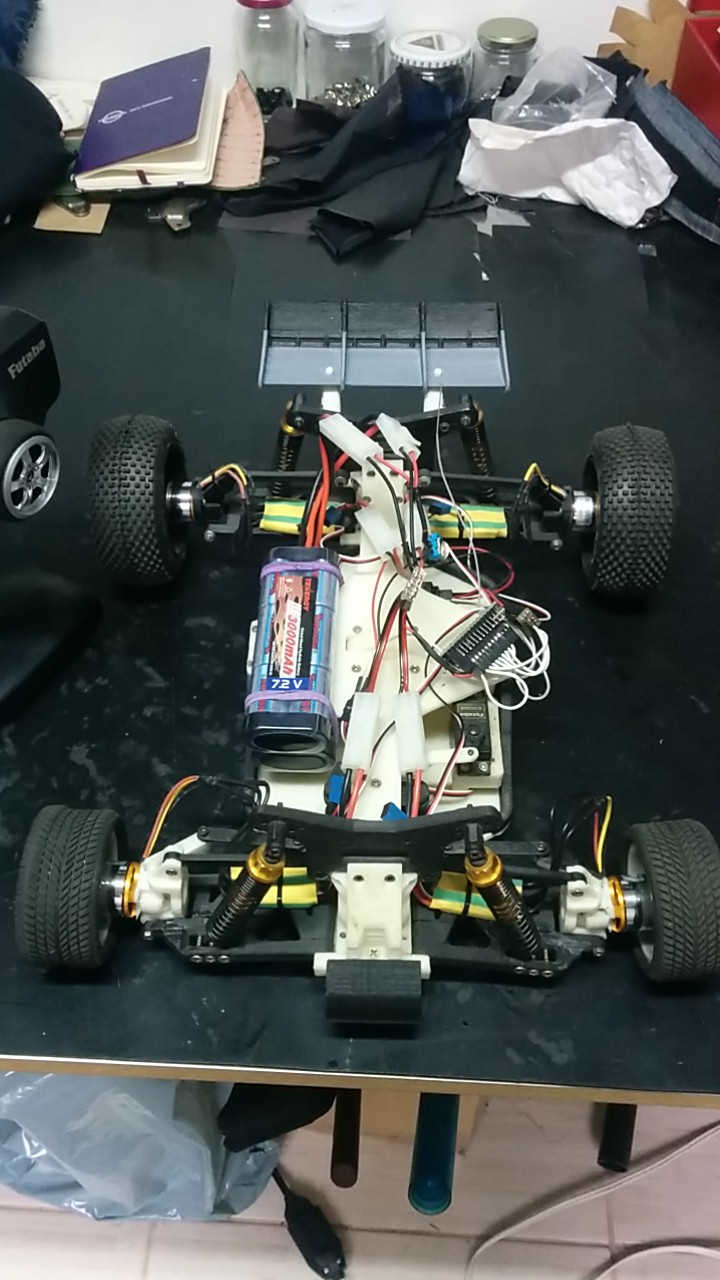
As you all can see, this a Truggy 
But I have been working on a modification so it would roll on 4 individual electric motors, one on each wheel!
And it’s FINALLY minimally working so I can show you guys.
There are tons of problems to solve and I have just scratched the real work to make it just as or better then your regular Truggy.
I will make a separate post with the actual specs, the points I need help with and the general problems I’m facing. Any help will be appreciated and I’m hopping this could be part of the official project.
It’s really hard to find appropriate parts for RC (hobby stores in general) in Brasil and when you find it’s too damn expensive. Buying the same parts you guys have in US and Europe also doesn’t work very well, our money is worthless this days and custom’s tax are high (60% over total price including shipping). So I had to depend on chinese goods that take a long time to arrive but I can pay for
But for now, what do you think of the concept?
Do you know of any other projects similar to mine? (cause I found none…)
Also a video of its first test run.
Hi Andre.
Your project looks very good. Really nice job.
I’m working on something very similar. There are few differences. I prefer hide motors to car body so there is less unsprung mass. And also I’m using gear reduction to get more torque and less rpm.
Anyway. I can’t wait to see some more details of your project.
Good luck
Thanks Roman, I totally agree with the sprung mass problem. I made another post with the upgrades I wish to make and that is something I’ll address.
The BEST solution I see, would be to use small car motors attached to the wishbones and connected to the wheels with a small shaft.
Hi guys, what should be the main goal of this project?
A very fair question Gustavo!
We know by now that electric vehicles have better performance than internal combustion ones. This of course a generalisation.
We also know that electric motors connected directly to the wheels are the most efficient way to use them (the very first cars produced where like that). For that we need an even number of motors, two on the back, in the front or on the four wheels.
Thanks to Audi, we know that 4 wheel drive is a very good setup for performance on variable terrain, standard today on rally cars.
So the first question we need to answer is, does 4 smal motors create a better result (in any sense) than one big motor divided by 4?
I don’t know, but I would like to!
Does it uses less energy? Does it creates more tork? Top speed? Stability when cornering?
We don’t know!
So I guess the answer to your question right now would be “make it work as good as we can and then we see where it’s going”.
Right. I absolutely agree that concept of four motors on each wheel is great. And I think it is the best car concept ever.
Central motor with difs have some advantages. Physics make some important job - 4WD and 3 diffs can shift torque where it’s needed. Diffs have some energy lost, it is useful because when you need power on a locked wheel, you just add gas. There will be never 0Nm on any wheel because of those losts.
It is very difficult to handle the same on electronics and is that even possible at something so simple like RC car? Can ESCs gave information to controller board about current consumption, calculate torque, predict wheel slip? Even if yes, I can’t imagine how complicated algorithm have to be. Those systems also takes energy and add weight.
For that reasons, it doesn’t make me a sense to do that on RC car.
But if you want to have this concept like 4WD with all difs closed, then it is fine. You just have to handle mass on each wheel.
Reason why I using 4 motors is mostly about torque vectoring.
It is better use one big motor and use some type of differential like Ford Focus RS using currently. I’m pretty sure one motor solution will have better power consumption. Torque will be also better in some cases. Let’s imagine two cars.
First with one motor and 100Nm
Second with 4 motors and each motor can produce 25Nm. So total 100Nm.
In most cases will be same torque on both car as driving style required. But in some cases like full acceleration or full cornering. With 4 motors solution you never will more torque on wheel than 25Nm. But during strong acceleration when centre of gravity will move to back and suddenly your front wheel can take for example only 20Nm and rear 30Nm. But you can’t change it with 4 motor solution. With one motor solution and torque vectoring diferentials you can send 100Nm to any wheel. Reason why I’m using 4 motors and not one motors solution is because it is easier for me create this for my needs. Is much more complicated create torque vectoring differential then electronic differential with 4 motors.
@Roman_Sipula “Is much more complicated create torque vectoring differential then electronic differential with 4 motors.” Yeah! 
Can you tell me more detail about how you are doing this? What requirement you have for esc, control board etc?
Gustavo, the algorithms is the fun part 
It’s simpler than you imagine, most parts are matematical formulas receiving input values. Things like ABS control is just a state machine.
A straight of the shelf esc can’t give you much in terms of information. But you can use other sensors connected to the controller (an Arduino in my case) to get the info you want.
Worst case scenario, I build my own esc…
Roman, on the last press conference from Tesla Motors, they said the new car with two motors (one big at the back, one small at the front) consumed lass energy than just one on the previous model.
About tork distribution, I don’t know if we can do this, but it’s my understanding that tork is limited by tension. If you take some power out from the “less needed” motors and send to the one that “needs more”, it would be juat like a diff, right?
To the last paragraph: No, diff works “passive” and just distribute torq from more blocked wheel to the other one. It is wanting because of steering, where inner wheel drives smaller circle then the outer one.
But it has negative - when any wheel starts slipping, there is no way how to stop it - especialy in no adhesion conditions.
Best is to add more torque into outer wheel, because it will be than much faster - well known from Mitsubishi Lancer Evo.
@Andre_Frazatto
If Tesla guys said so I will definitely no argue with them at all. They have a bit more experience than I. 
@Gustavo_Gustik
I’m not so far yet and currently working on motors overheating issues. But main idea for torque vectoring electronic diff is: Use basic ESC and all data should be managed and calculated by controller
With this formula you can calculate electric motor torque: τ = (I * V *60) / (rpm * 2π)
τ - torque
I - current
V - voltage
Voltage, current and hall (rpm) sensor are cheap and compatible with arduino. I’m currently using only rpm input as torque isn’t my main issue yet. So if we can calculate torque for each wheel we can compare values and decide if one wheel have some slip. I did not test this yet but I’m expecting from slipping wheel have more rpm and less current. Question is what happens when all wheel will have some slip? Probably reduce power for short time on one or two wheels should give me reference RPM and from this should be possible decide if there is any slip or not.
I’m using STM32 development board as this board have much higher clock speed than arduino uno. There are to many interrupts for 16Mhz core. But using STM32 is not easy as arduino so maybe I will change it to some higher arduino version.
I always find amazing that G+ don’t let you send private messages to people…
@Roman_Sipula how can I reach you?
Thanks Thomas!
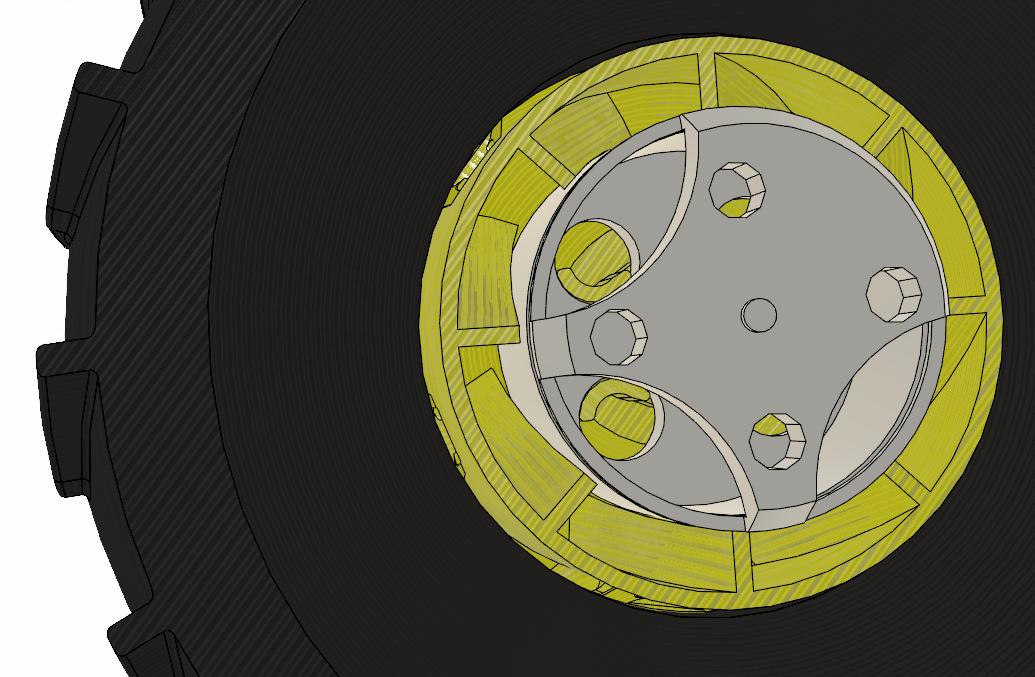
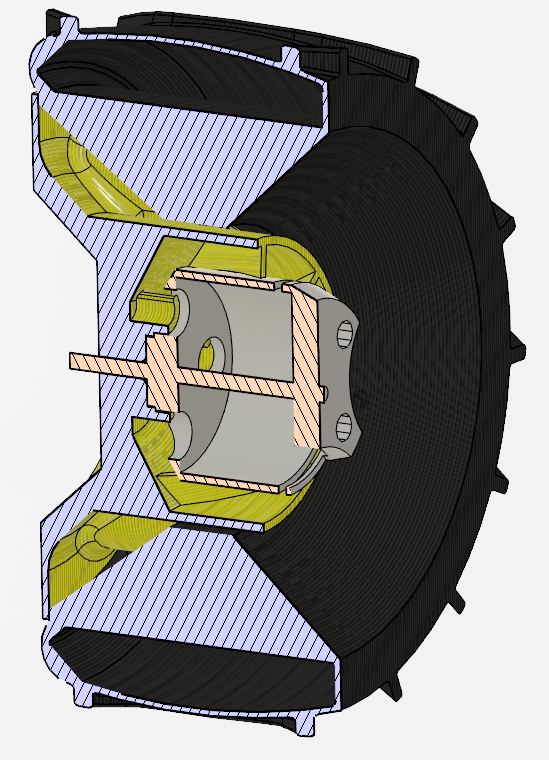
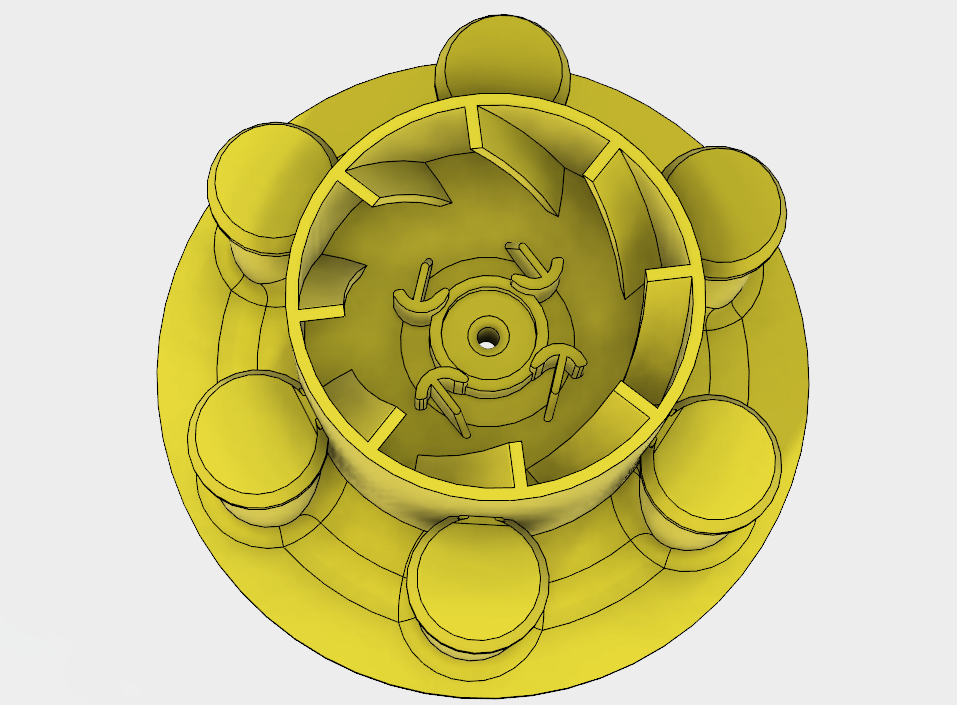
The cooling pattern is specially nice.
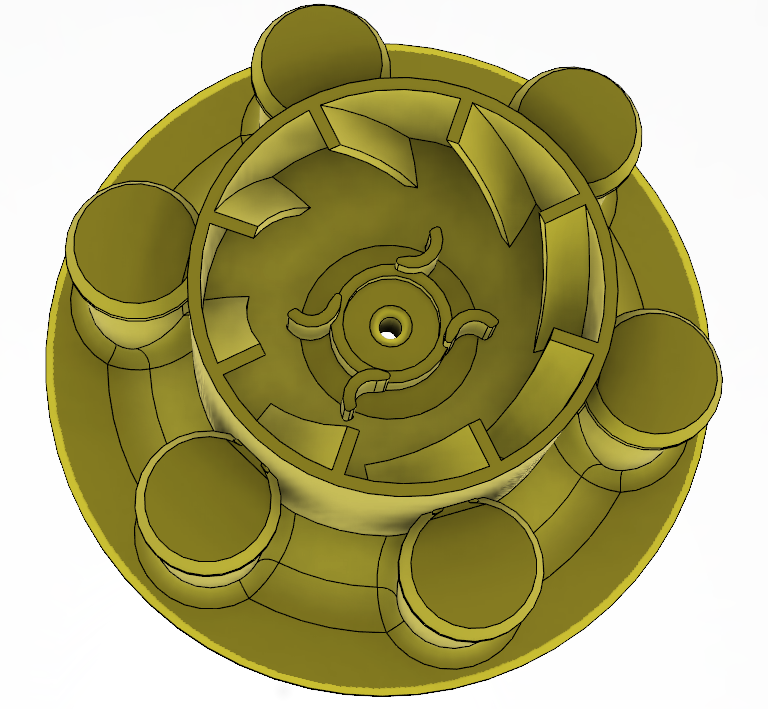
better view of the inside features…
printed nicely, lets hope it fits your motor and that the rotation-stops does not brake easily…