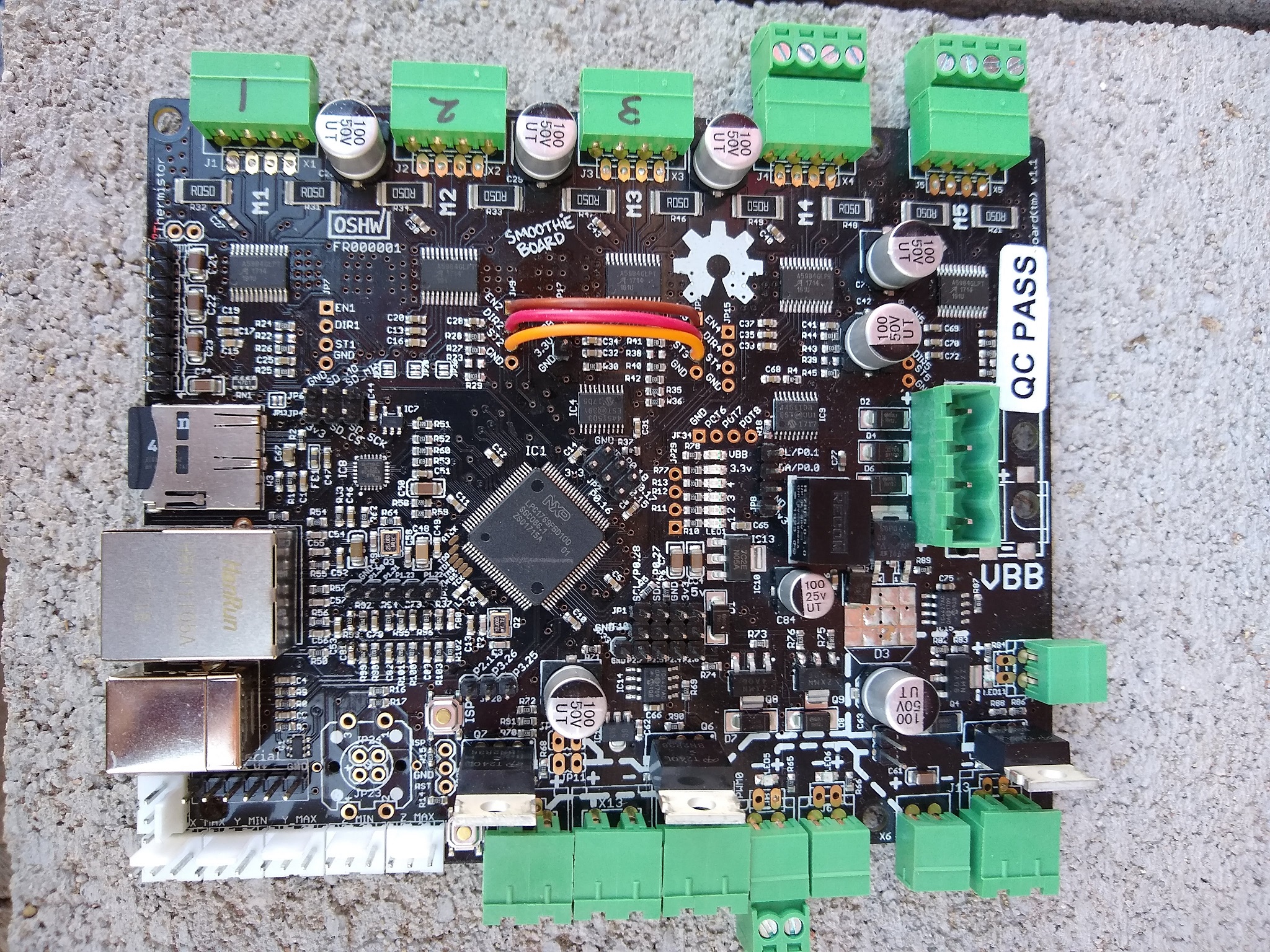
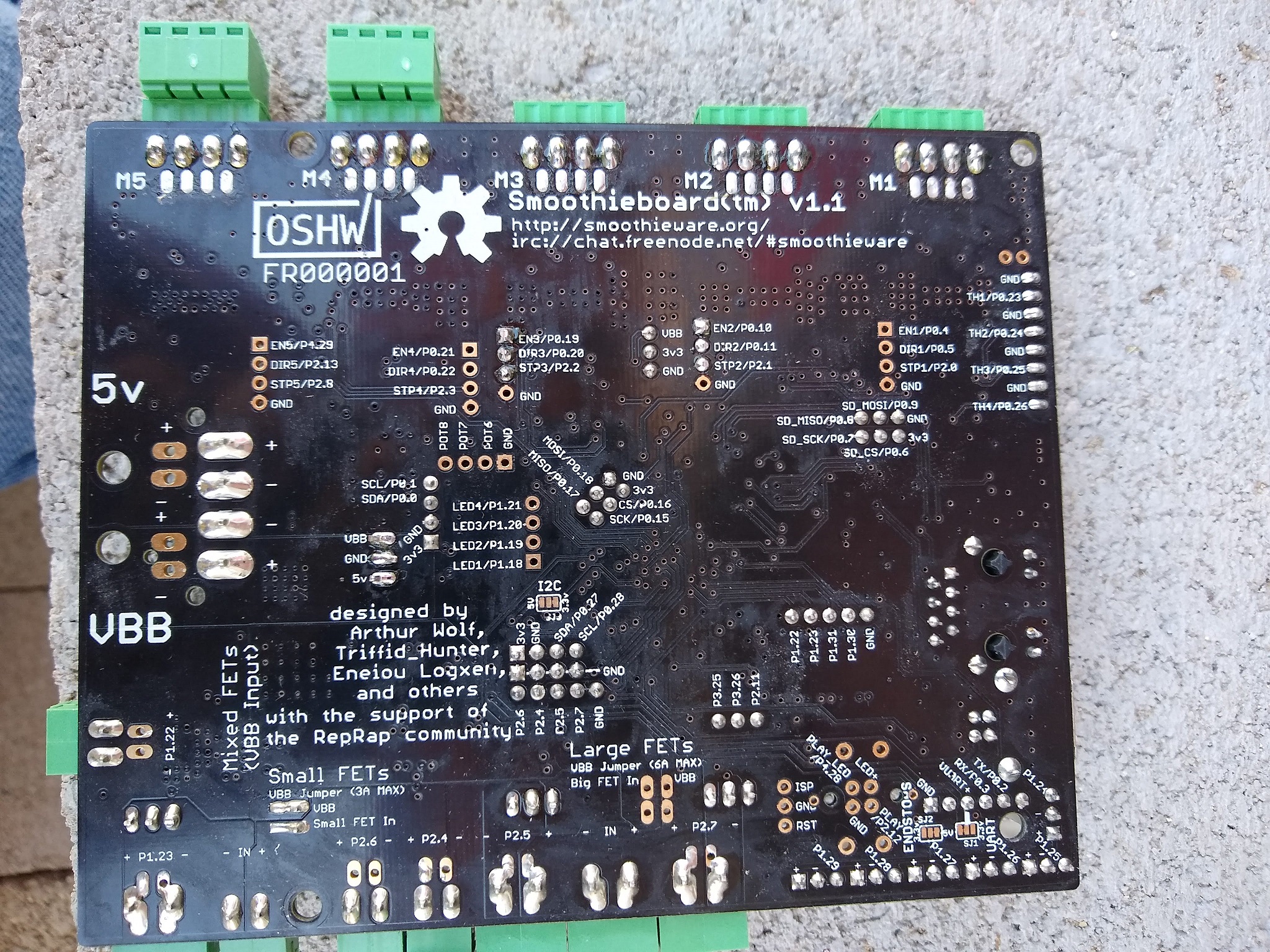
Hi. I bought a surplus Smoothie 5 axis v1.1 board on ebay a few months ago, and I’m finally getting around to making it talk. I have an Acro laser cutter kit connected to it. I have two Y motors (board jumpered to run both driver ICs from beta axis stepper commands) and one X motor. Both axes on the gantry move properly using pronterface, clicking the various jog rings for 1, 10, and 100mm steps. The limit switches all work properly, left right up and down.
Trouble is, when I give it a Home command G28 X0, the board immediately goes limp, and the blinking LEDs stop blinking. I have to cycle power to get it to respond again.
I don’t understand why it hangs. I have adjusted the homing speeds down. There are no Google results for this problem.
For what it’s worth, I’m an old EE who’s done decades of work on all sorts of embedded systems.
I would really appreciate some help in solving this.
It’s running the most recent stable firmware :
slight_smile:Build version: edge-bdb141f, Build date: Jan 12 2020 10:21:20, MCU: LPC1769, System Clock: 120MHz
5 axis
The config.txt file as below:
# NOTE Lines must not exceed 132 characters
# David Forbes laser cutter 04/11/20
# grbl_mode true # changes G28 for CNC not 3D printer
## Robot module configurations : general handling of movement G-codes and slicing into moves
default_feed_rate 4000 # Default rate ( mm/minute ) for G1/G2/G3 moves
default_seek_rate 4000 # Default rate ( mm/minute ) for G0 moves
mm_per_arc_segment 0.5 # Arcs are cut into segments ( lines ), this is the length for
# these segments. Smaller values mean more resolution,
# higher values mean faster computation
# Arm solution configuration : Cartesian robot. Translates mm positions into stepper positions
alpha_steps_per_mm 228.57 # micro(32x) Steps per mm for alpha stepper 14T * 2mm/rev, 200 step
beta_steps_per_mm 228.57 # micro(32x) Steps per mm for beta stepper
# Planner module configuration : Look-ahead and acceleration configuration
planner_queue_size 32 # DO NOT CHANGE THIS UNLESS YOU KNOW EXACTLY WHAT YOU ARE DOING
acceleration 3000 # Acceleration in mm/second/second.
acceleration_ticks_per_second 1000 # Number of times per second the speed is updated
junction_deviation 0.05 # Similar to the old "max_jerk", in millimeters,
# see https://github.com/grbl/grbl/blob/master/planner.c
# and https://github.com/grbl/grbl/wiki/Configuring-Grbl-v0.8
# Lower values mean being more careful, higher values means being
# faster and have more jerk
#minimum_planner_speed 0.0 # sets the minimum planner speed in mm/sec
# Stepper module configuration
microseconds_per_step_pulse 1 # Duration of step pulses to stepper drivers, in microseconds
base_stepping_frequency 100000 # Base frequency for stepping
# Cartesian axis speed limits
x_axis_max_speed 3000 # mm/min
y_axis_max_speed 3000 # mm/min
z_axis_max_speed 300 # mm/min
# Stepper module pins ( ports, and pin numbers, appending "!" to the number will invert a pin )
alpha_step_pin 2.0 # Pin for alpha stepper step signal
alpha_dir_pin 0.5 # Pin for alpha stepper direction
alpha_en_pin 0.4 # Pin for alpha enable pin
alpha_current 1.0 # X stepper motor current
alpha_max_rate 3000.0 # mm/min
beta_step_pin 2.1 # Pin for beta stepper step signal
beta_dir_pin 0.11 # Pin for beta stepper direction
beta_en_pin 0.10 # Pin for beta enable
beta_current 1.0 # Y stepper motor current
beta_max_rate 3000.0 # mm/min
gamma_step_pin nc # Pin for gamma stepper step signal
gamma_dir_pin nc # Pin for gamma stepper direction
gamma_en_pin nc # Pin for gamma enable
gamma_max_rate 300.0 # mm/min
# DF removed gamma pins, wiring motor 3 to motor 2 control pins
gamma_current 1.0 # Y 2nd stepper motor current
## System configuration
# Serial communications configuration ( baud rate defaults to 9600 if undefined )
uart0.baud_rate 115200 # Baud rate for the default hardware serial port
second_usb_serial_enable false # This enables a second usb serial port (to have both pronterface
# and a terminal connected)
#leds_disable true # disable using leds after config loaded
#play_led_disable true # disable the play led
# Kill button (used to be called pause) maybe assigned to a different pin, set to the onboard pin by default
kill_button_enable true # set to true to enable a kill button
kill_button_pin 2.12 # kill button pin. default is same as pause button 2.12 (2.11 is another good choice)
#msd_disable false # disable the MSD (USB SDCARD) when set to true (needs special binary)
#dfu_enable false # for linux developers, set to true to enable DFU
#watchdog_timeout 10 # watchdog timeout in seconds, default is 10, set to 0 to disable the watchdog
# Only needed on a smoothieboard
currentcontrol_module_enable true #
## Extruder module configuration
extruder.hotend.enable false # Whether to activate the extruder module at all. All configuration is ignored if false
## Laser module configuration
laser_module_enable true # Whether to activate the laser module at all. All configuration is
# ignored if false.
#laser_module_pin 2.5 # this pin will be PWMed to control the laser.
# Only P2.0 - P2.5, P1.18, P1.20, P1.21, P1.23, P1.24, P1.26, P3.25, P3.26
# can be used since laser requires hardware PWM
#laser_module_maximum_power 1.0 # this is the maximum duty cycle that will be applied to the laser
#laser_module_minimum_power 0.0 # This is a value just below the minimum duty cycle that keeps the laser
# active without actually burning.
#laser_module_default_power 0.8 # This is the default laser power that will be used for cuts if a power
# has not been specified. The value is a scale between
# the maximum and minimum power levels specified above
#laser_module_pwm_period 20 # this sets the pwm frequency as the period in microseconds
## Temperature control configuration
# First hotend configuration
temperature_control.hotend.enable false # Whether to activate this ( "hotend" ) module at all.
# All configuration is ignored if false.
## Switch module for fan control
switch.fan.enable true #
switch.fan.input_on_command M106 #
switch.fan.input_off_command M107 #
switch.fan.output_pin 2.6 #
switch.fan.output_type pwm # pwm output settable with S parameter in the input_on_comand
#switch.fan.max_pwm 255 # set max pwm for the pin default is 255
## Endstops
endstops_enable true # the endstop module is enabled by default and can be disabled here
alpha_min_endstop 1.24!^ # add a ! to invert if endstop is NO connected to ground
alpha_max_endstop 1.25!^ # NOTE set to nc if this is not installed
alpha_homing_direction home_to_min # or set to home_to_max and set alpha_max
alpha_min 0 # this gets loaded after homing when home_to_min is set
alpha_max 550 # this gets loaded after homing when home_to_max is set
beta_min_endstop 1.26!^ #
beta_max_endstop 1.27!^ #
beta_homing_direction home_to_min #
beta_min 0 #
beta_max 280 #
gamma_min_endstop nc #
gamma_max_endstop nc #
gamma_homing_direction home_to_min #
gamma_min 0 #
gamma_max 20 #
# optional order in which axis will home, default is they all home at the same time,
# if this is set it will force each axis to home one at a time in the specified order
homing_order Y # x axis followed by y
#move_to_origin_after_home true # move XY to 0,0 after homing
# optional enable limit switches, actions will stop if any enabled limit switch is triggered
alpha_limit_enable true # set to true to enable X min and max limit switches
beta_limit_enable true # set to true to enable Y min and max limit switches
gamma_limit_enable false # set to true to enable Z min and max limit switches
alpha_max_travel 600 # max travel in mm for alpha/X axis when homing
beta_max_travel 300 # max travel in mm for beta/Y axis when homing
alpha_fast_homing_rate_mm_s 10 # feedrates in mm/second
beta_fast_homing_rate_mm_s 10 # "
gamma_fast_homing_rate_mm_s 4 # "
alpha_slow_homing_rate_mm_s 5 # "
beta_slow_homing_rate_mm_s 5 # "
gamma_slow_homing_rate_mm_s 2 # "
alpha_homing_retract_mm 5 # distance in mm
beta_homing_retract_mm 5 # "
gamma_homing_retract_mm 1 # "
#endstop_debounce_count 100 # uncomment if you get noise on your endstops, default is 100
## Z-probe
zprobe.enable false # set to true to enable a zprobe
## Panel
panel.enable false # set to true to enable the panel code
## Network settings
network.enable false # enable the ethernet network services
network.webserver.enable true # enable the webserver
network.telnet.enable true # enable the telnet server
#network.ip_address auto # use dhcp to get ip address
# uncomment the 3 below to manually setup ip address
network.ip_address 192.168.1.5 # the IP address
network.ip_mask 255.255.255.0 # the ip mask
network.ip_gateway 192.168.1.1 # the gateway address
#network.mac_override xx.xx.xx.xx.xx.xx # override the mac address, only do this if you have a conflict