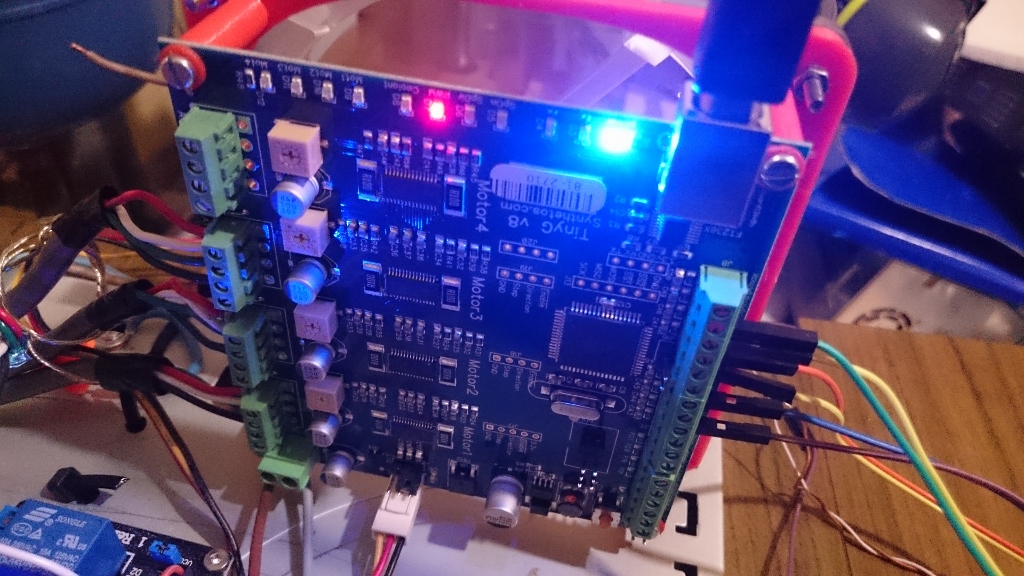
I finally connected the TinyG v.8 board today and made a first move.
My setup is:
CNC 3040 with NC limit switches for X (wired to Xmin), Y (wired to Ymin) and Z (wired to Zmax)
switches configured as Homing+Limit on the TinyG
NO probe connected to Zmin
120mm 12V PC fan connected to TinyG and continuously cooling the bottom part of the TinyG board
current limiting pots set half way (~50%)
switches and probe are running 5V and I used optocouplers to conenct them to TinyG
Vmot is 30V, I ordered 24V (recommended) power supply on eBay
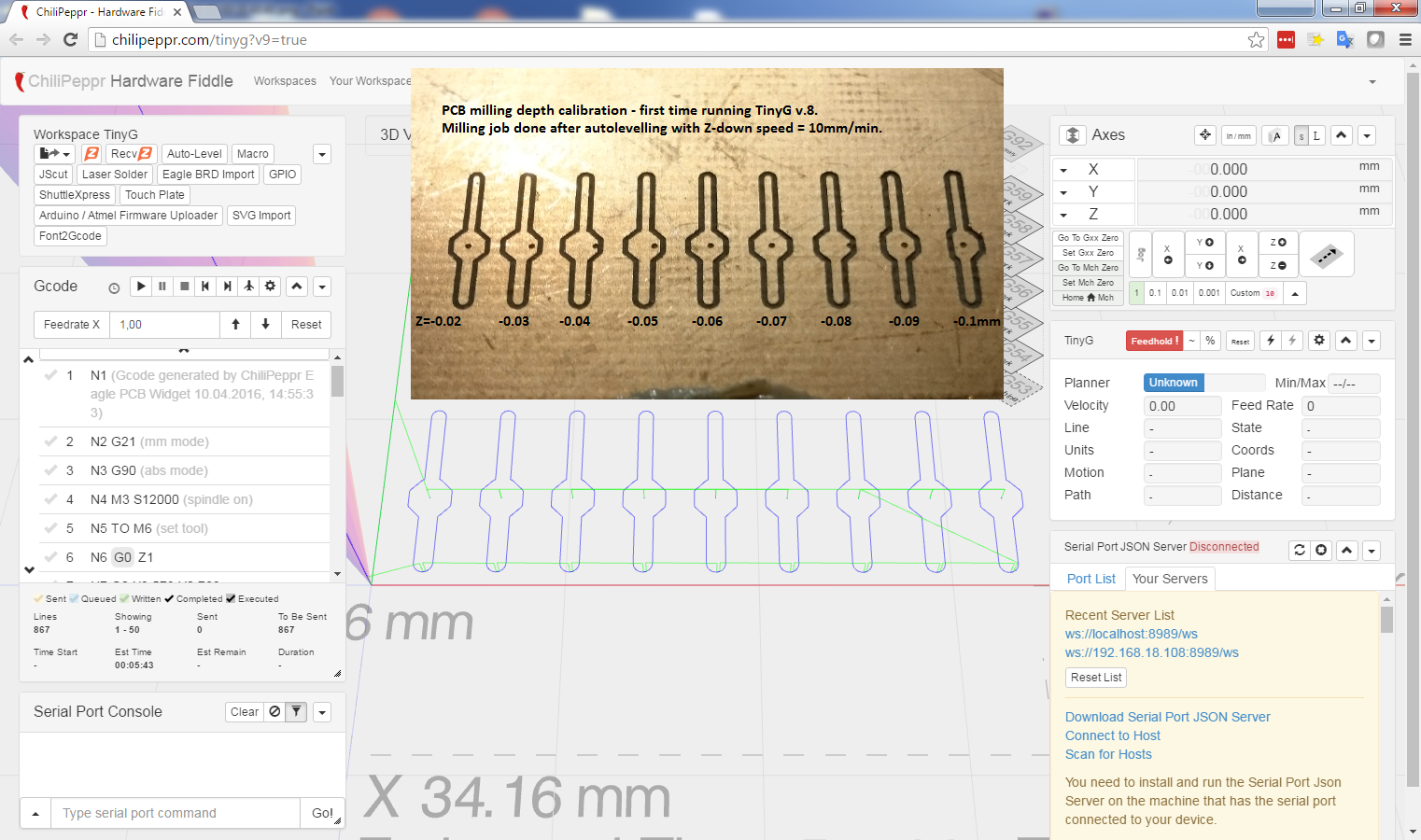
First tests: Homing works fine with my NC limit switches, although the cycle is a little different than in TinyG2. Probing… after my experience with G2, no problems here so far. I used 36 probe points to probe the test job from the picture below with having no issue here. First job - this simple job contains nine identical elements, a simple pin with two traces 16 mils facing up and 24mils facing down. The only difference is Z-depth, starting Z=-0.02mm down (most left) to Z=-0.1mm (most right) with -0.01 step down. I want to see what milling depth is best for my machine setup.
The problem:
After running the milling job I found the first occurence already fine from the depth point of view (will probably try even a bit higher next time), but there are some issues:
elements are placed not exactly as they should be
last two elements have some shape issues
drill locations are not correct
the width of traces should decrease going left to right, as we go deeper with milling, but this is not
This is one of my possible guess too, but why only X axis gets ‘affected’. This is exactly the same setup I used with G2 before. The difference I see running TinyG comparing to TinyG2 is that the ball screws are moving more ‘aggressive’. The transition from STOP to MOTION and vice verse is not as smooth as with G2. So maybe the motor is not able to immediately stop and moves a little too far, then expected. I hear also the motors are now working a bit differently than before (G2). I am currently set with velocity max 300mm/sec on X and Y axis. Might this be still some parameters tuning needed?
I will give it more tuning and try to find the right (lower, I guess) current value for motors using the pots.
‘aggressive’ could be a combination of jerk, maximum velocity and current settings. How similar are these between G2 and tinyG?
If currents are too low, holding torque could be inadequate to stop the stepper.
After having consultancy with @Frank_Herrmann , who is also using 3040 and parameters tuning the machine moves nicely. And it looks I possibly found the root cause of X axis problems. As I run out of ideas I decided to quit further testing for today, but just before leaving I started to check axis movements rotating motors by hand to check eventual torque problems or resistance. Then I found X axis sometimes not exactly following my hand rotations. I need to re-attach the coupler to the shafts on both sides tomorrow and I am pretty sure this will do the trick. Clear sign of Murphy’s Law here.