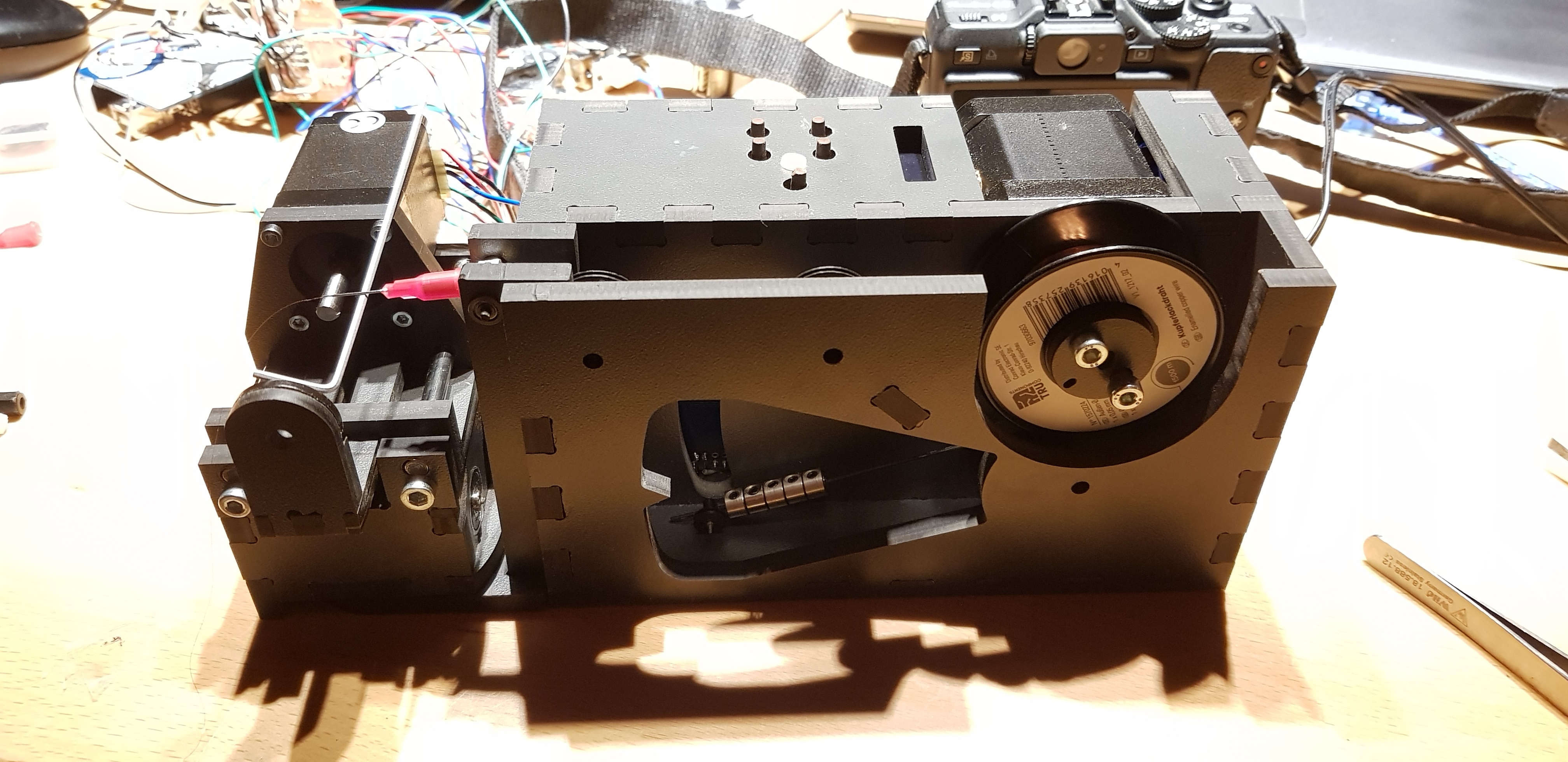
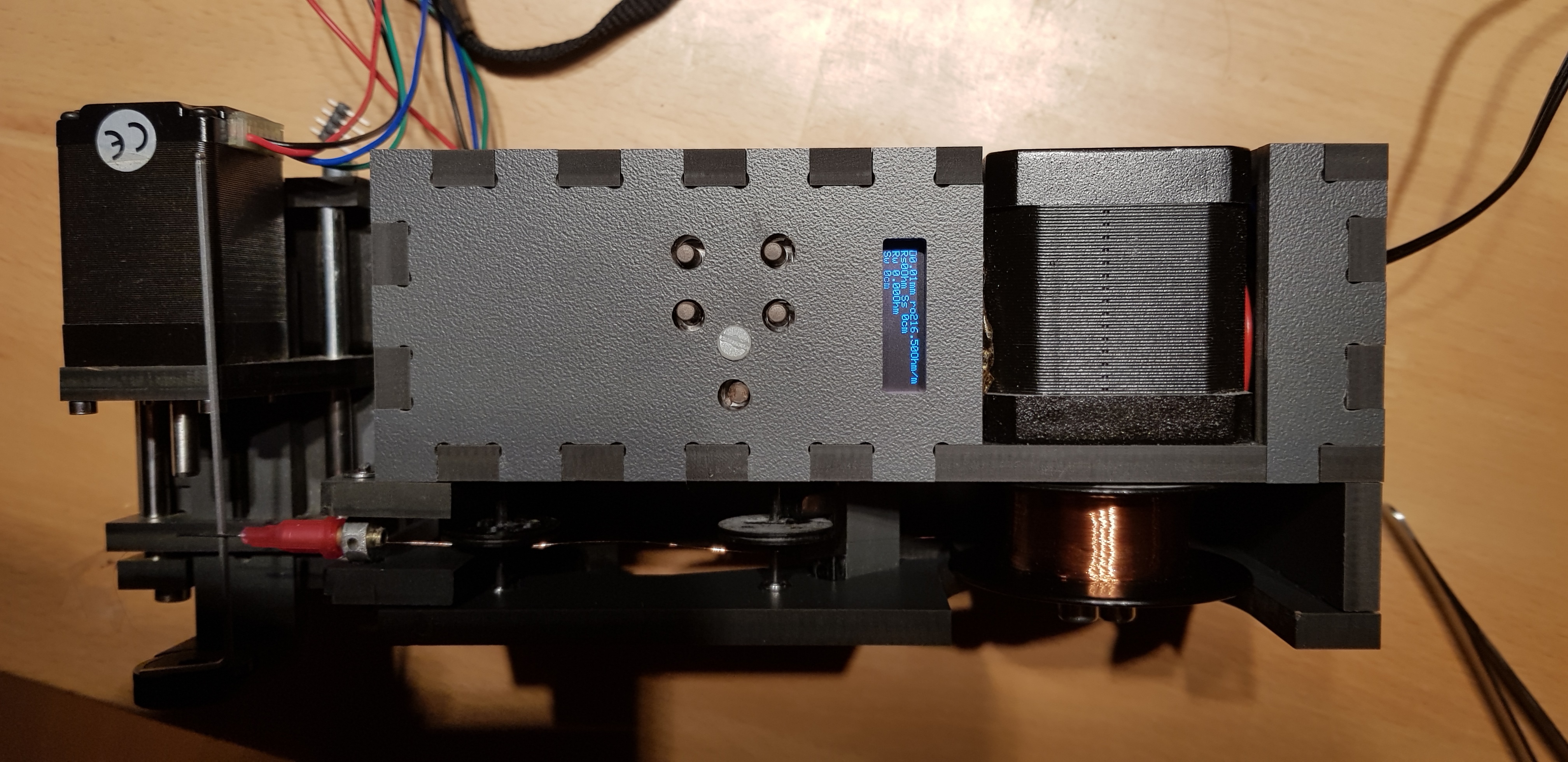
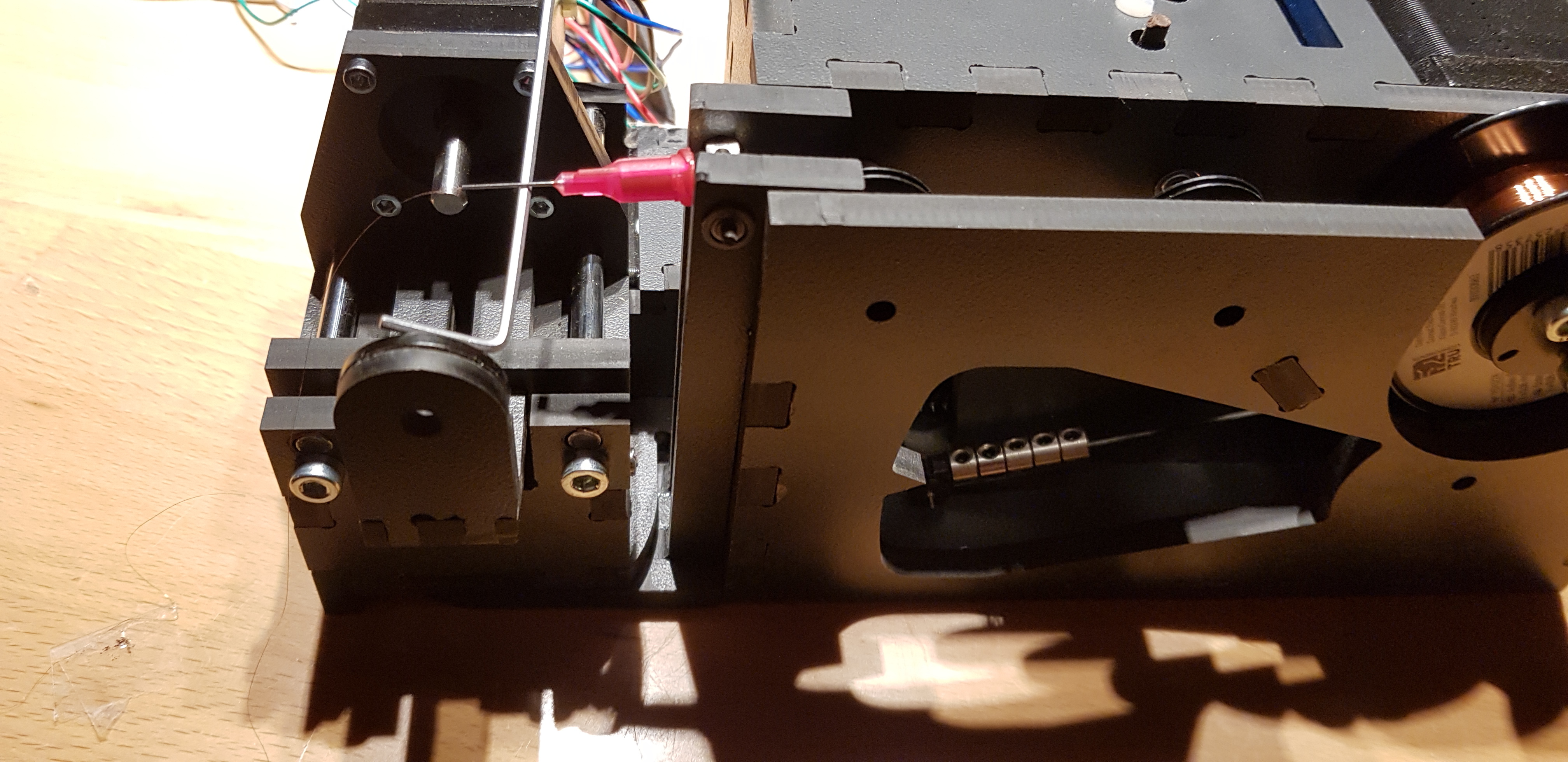
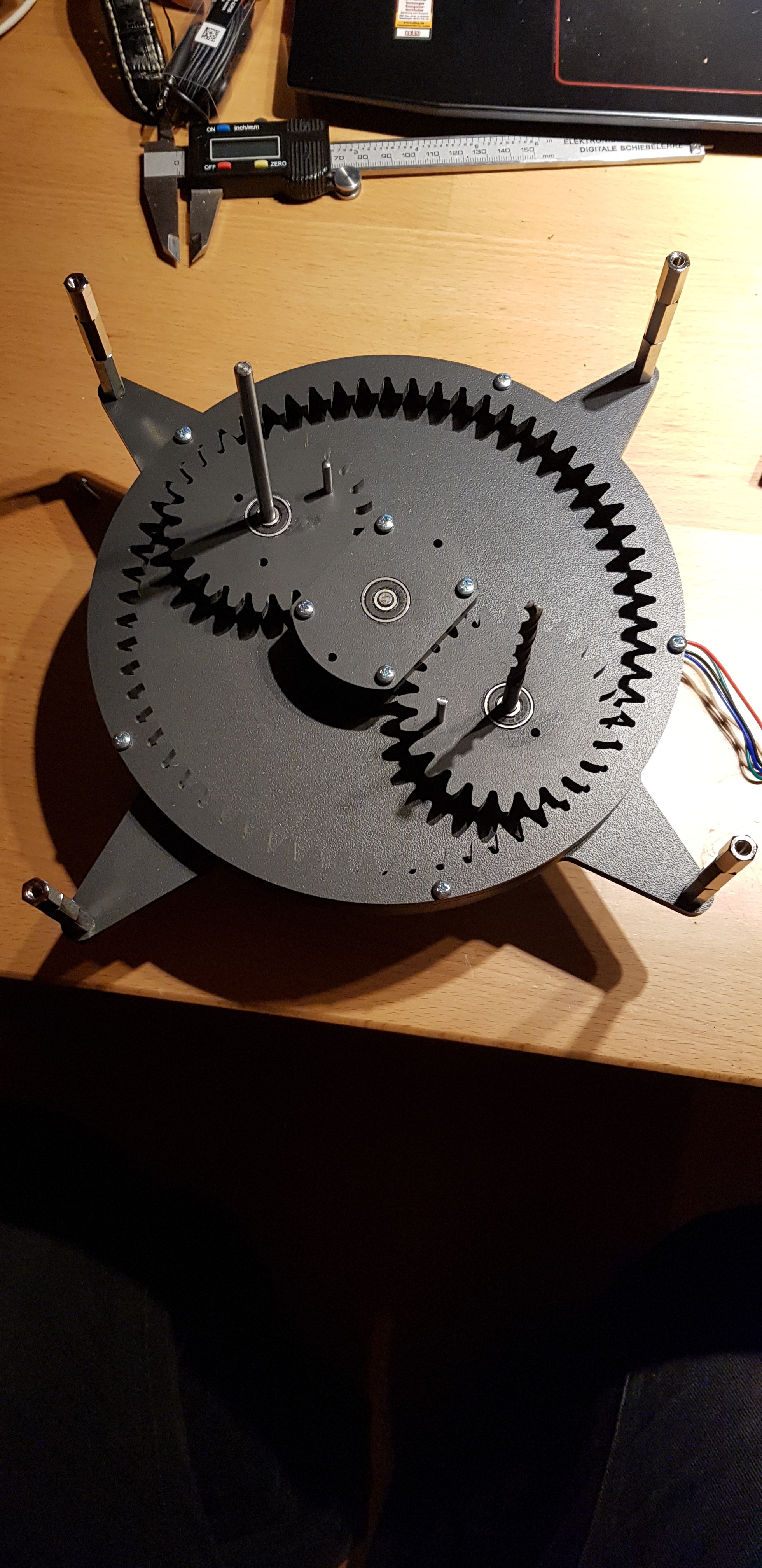
Meanwhile I setup the harnesses of the light barriers… as I try to have a 5 states wire support indicator using an array of light barriers, I recognized that there is too much light emitted so the phototransistors are not fully high impedance. Perhaps I need a comparator PCB to have clear digital signals.
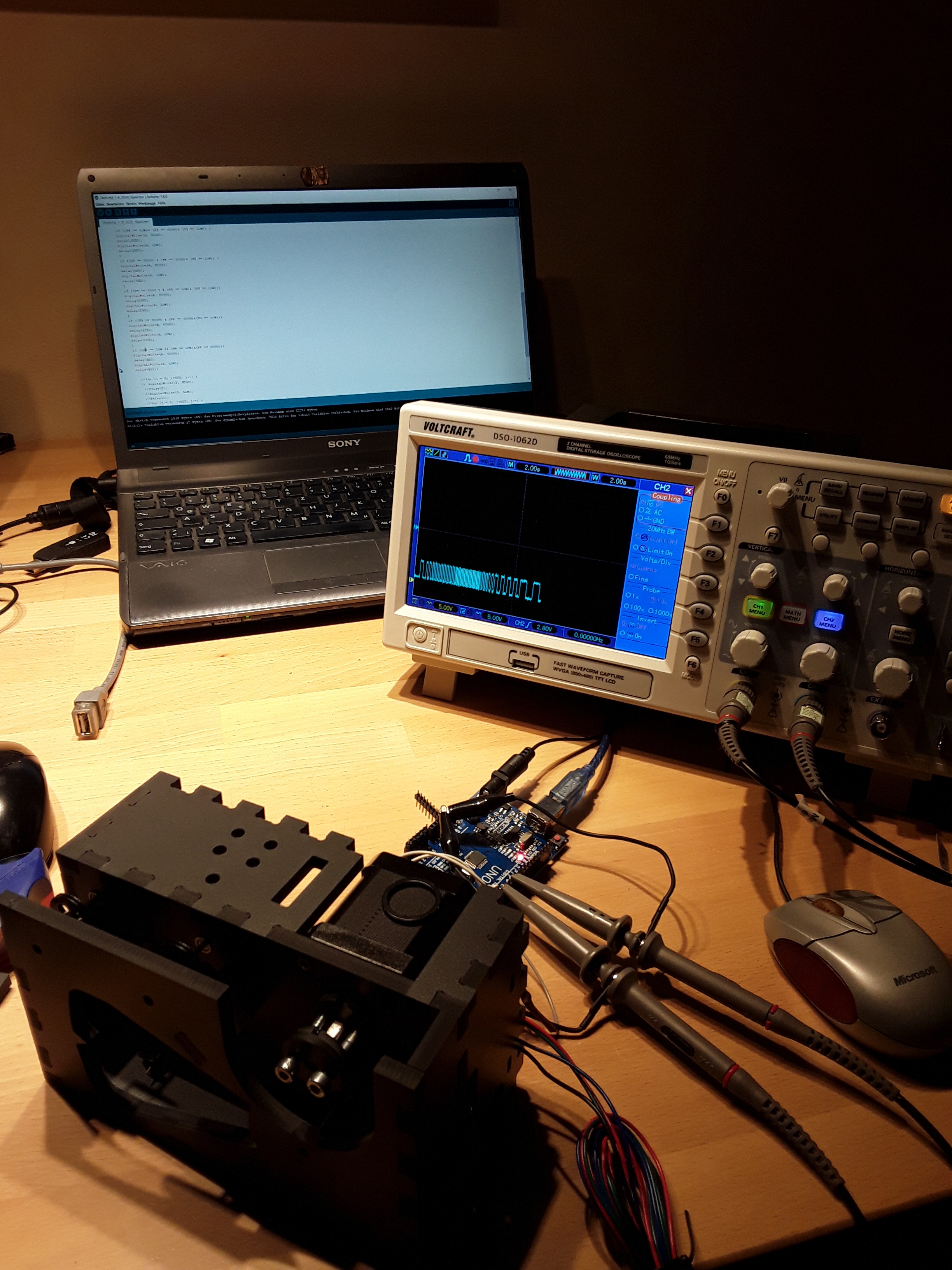
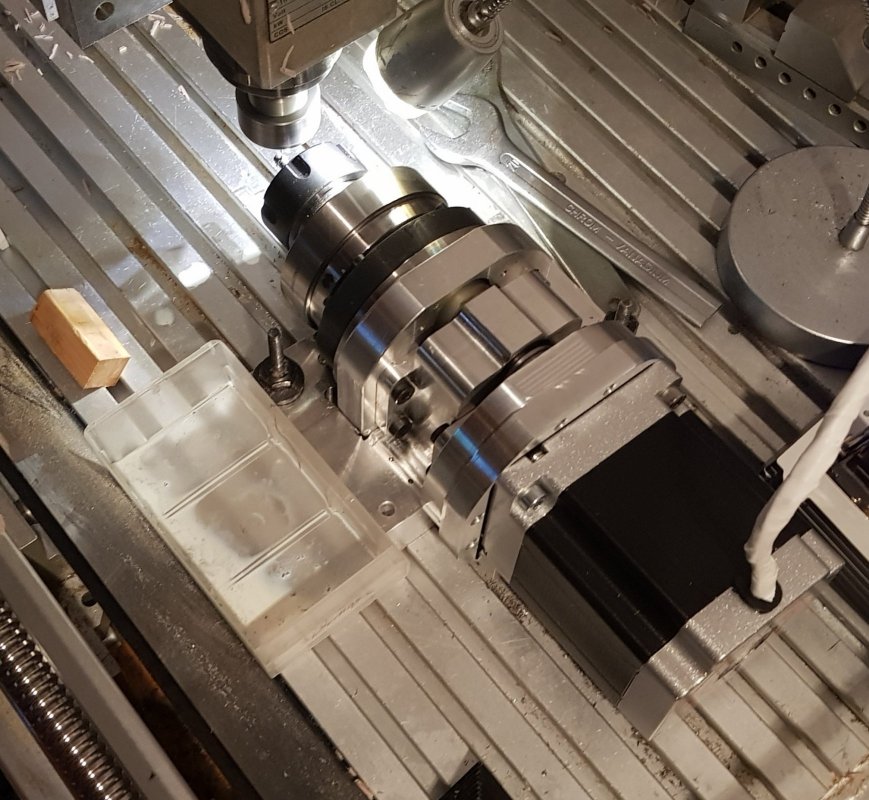
I also did a simple sketch to get the axis moving but recognized a strange thing I will have to check tomorrow.
Each I/O I need is initialized to be an output and pre loaded with the initial state. The sketch consists of two for loops to apply the stepping signals to the polulu driver shields. When the program starts the feeding motor does several steps into the wrong direction before changing to the right one… tomorrow I will have to see if ths would be hardware bound.

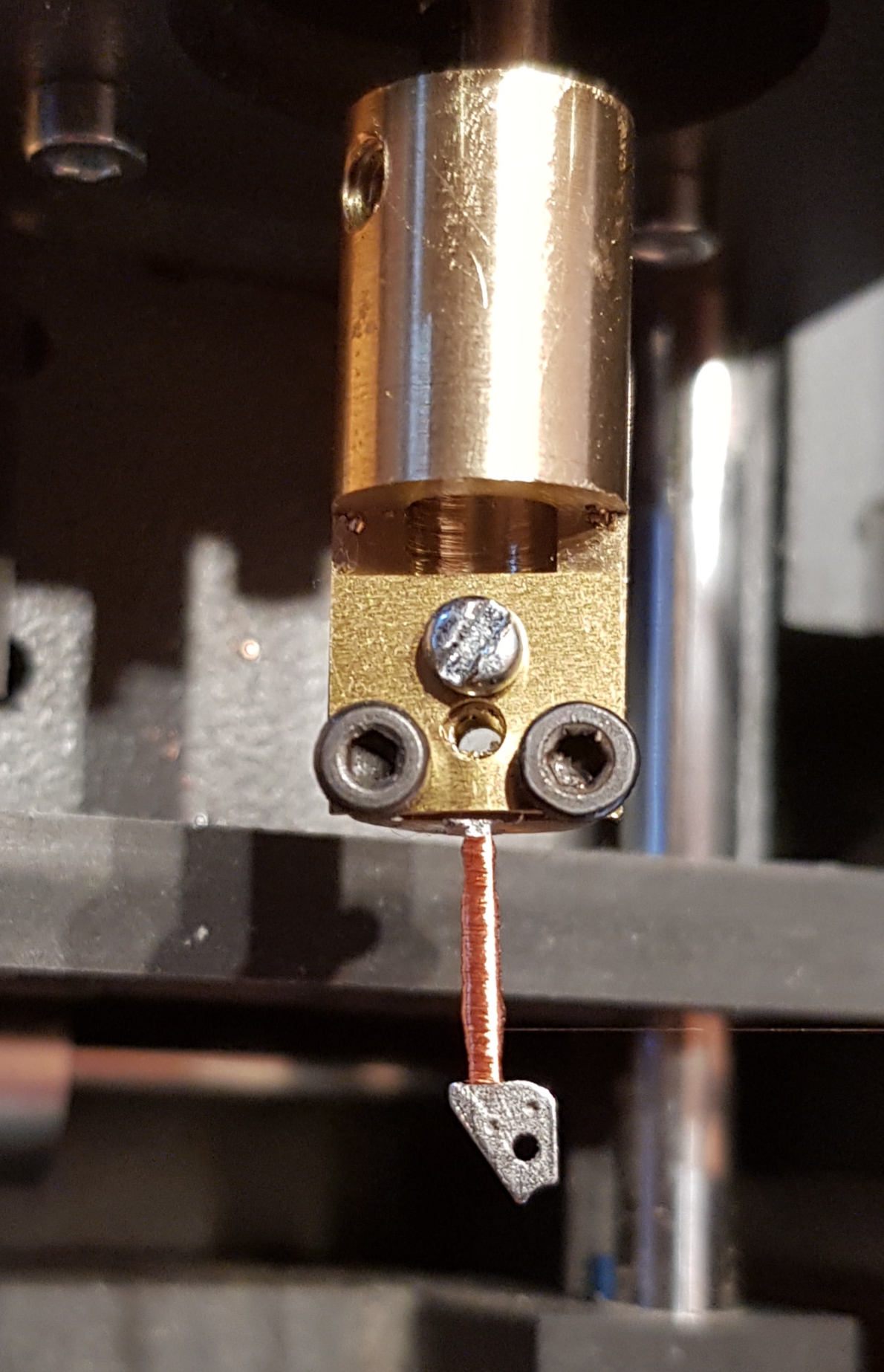
But the stepping feed is pretty acurate for the cheapish setup I run. Step width is between 0.03 and 0.05mm
With quite some elastic play under applied load conditions. But how much load can I get from a 0.02mm Copper wire, othogonal to the moving direction. 
But thats it just for today…











{kind=link}