To be honest, I would be okay with 100 and ecstatic if we could get 300 and overjoyed if we could get 1000.
1 Like
So you’re not really looking for infinite Z, just a Z axis that can extend outside the frame. There have been a couple of scissor-lift Z axis designs that could easily reach 100mm, and maybe even 300mm.
2 Likes
imagine a tube which is printed outside the printer and the printer is moving inside by either 3 tracks - or with 2 lips that compress and so seal and then move up or down. Would require an aditional rotating arm with a hotend so this didn’t interfere with the object printing. Or putting a 360 SCARA inside that can reach over the rim.
This does not fit any more in the backpack or at least three regular screws could do the job.
In the backpack I take normally my screw delta for which need to screw 6 nuts to make it operable, can see in my albums
Infinite Z was for me something different of a challenge ![]()
The printer would look like a ring with a little arm that run 2cm outside of the Ring - it would be about 5 cm high and the diameter of your print area - if the scara is mounted upsidedownwards it can use the whole area like an ecccentric disc printer … if the tube will be hold from the outside you didn’t use the extra arm. And if you use three arms instead of a ring - everything can fold (including the scara) to a radius×5×5 package.
Nothing is really infinite but I will settle for unlimited by the motion platform itself.
1 Like
Not using the print to support the printer, a rail is used. But might be some good inspiration, the approach is simple & clever by flipping an original Ultimaker upside down:
little cones could register into the column to ensure position didn’t shift, but also this need a hole for starting - i like your idea as this will work from a plain ground. And you need to tweak g-code. I see a problem that the frame need a little Z else you can’t print the odd pillar layer after you changed the mount to the just printed even pillar as this rises the frame 1 layer up. But your mounts could allow this movement. However i don’t think it is a good idea to use the surface as this mean your print need to stopp twice for the pillars to adjust. I thought about something like that (didn’t fully understood your idea till now) - there is a demolition exavator for chimneys working like that (but inversed)
However i am keen to see how you make this working.
That chimney demolition machine is an excellent analogy. Play it in reverse and that’s a perfect machine 
Seriously though, I think we’re on to something here. Nick and I had also talked about the idea of a single surrounding pillar (like a full-height skirt on steroids) as an alternative to pillars. Either could work. A skirt might take more material, or it might not, since the stiffness is shared between feet (whereas individual pillars are on their own). A wider footprint means better stability too.
Ok, I see how the idea is supposed to work now. Keep in mind, though, that you WILL have to dip when you switch sets of feet, because the nozzle will have to drop down to the level where the other set of pillars was last printed in order to add onto them. Unless the plan is to switch twice every layer, which would probably require printing the columns nearly solid. I also think you’re going to have trouble with repeatability when you are switching supports each layer. Maybe printing the columns hollow and using downward-pointing cones to center in them would work, but I still think your layer alignment would be pretty bad.
1 Like
I did find one big problem with switching tabs every layer. Even if the printer doesn’t shift or twist or get out of level…the thickness of the layers you will lift from will probably be off by some percent. This will cause compounding z issues. That can be solved by having tabs swap out every so many millimeters instead of every layer with a longer actuation range.
@Whosa_whatsis We could have two steppers working in concert. Lower all tabs into place and then retract.
New idea background: I have been working with steppers controlled by a microbit. I have it setup so most of the time the stepper faithfully interprets the step commands from the controller. However, I can individually control the steppers through a phone app, buttons on microbit, etc. I am doing this so that I can make a printer that can run some number of slaved extruder/hot end modules but I want the ability to turn off one off, adjust flow rate on one, turn temperature up on one, turn off if no filament present, etc.
New idea: I would do roughly the same approach as the video but with 5 or more feet. Make the feet have proper linear rails with no swing out of the way feature. Make each foot have its own “smart” stepper. If any foot reaches the end of its short range of motion, the foot is pulled up. Every so often, the retracted foot will try to go back down to see if you inserted anything below it. It would be fairly easy to put a pressure sensor on the foot to get even loading. Add tilt measurement from the microbits and we can do microadjustments to make sure we track straight up. If a second foot also hits its range of motion then the printer will pause until someone can attend to the printer.
The good: This is essentially the backpack printer that I want. Most prints will be under 50mm which means no shennanigans. There is no wasted plastic. No gcode modification.
The bad: You need to have fairly stable blocks that you can stack under the feet. You have to help the printer along. Bumping the printer is still a problem.
What do you guys think? With 5+ steppers the printer is bound to be very stable due to the weight. I can imagine scenarios which all sorts of strange stuff under the feet: books, legos, jenga blocks, etc.
1 Like
Why not a quadcopter with a hot end strapped on? It could fit in a backpack and would make printer retreval easier as well. Not to mention, the machine could print in places out of reach say you want to 3D print a rain funnel, birds nest, or repair a hole in a roof. I don’t really see any batteries short of car batteries capable of powering a printer for infinite z so the printer will be tethered to the ground regardless of your kinematic choice. If accuracy is an issue, then simply increasing the size of the quad copter will increase its stability and increasing the nozzle size will decrease any visible imperfections. After printing a few meters, the printed plastic will be subject to a lot of torsional stresses if not by weather then its own weight so it will need the extra regidity of a larger nozzle print to hold itself together. I know it’s quite a bit different from the elevator building printer, maybe when you build the final machine it will have flight capabilities at least to get it back down safely.
1 Like
Haha. Possible. It would be an energy hog. Getting a quadcopter to have micron resolution is going to be hard. It would probably need a 3 dof solution on the quadcopter to do micro adjustment.
This is starting to sound like a reverse hang printer.
This is fun to think about but ultimately too loud, too technical, and too energy wasteful for my goals.
1 Like
Since what you are really looking for is a printer you can carry in your backpack, what about a tensegrity design? Carbon fiber tubes and spectra to hold it together?
1 Like
Kk no worries, looking forward to seeing more of how your idea progresses!
Also, the downwash would be so powerful that your plastic would cool too quickly, resulting in terrible layer adhesion, even with PLA. You could maybe shroud the area around the nozzle to protect it, but the air hitting the shroud would make the copter’s flight even less efficient.
And you would definitely need X/Y/Z stages on top of the flight platform to correct for positional error, similar to what the Shaper Origin does. For that matter, you could use a handheld system that worked that way, creating an actual 3D printing pen (calling the products that are marketed as 3D printing pens that is like selling a Sharpie and calling it an inkjet printing pen). Some kind of serial arm arrangement would probably be most efficient in that case. The motion tracking would be a more difficult problem though, since you need similar precision to what they’re doing, but while moving freely in 3D space instead of within a plane.
A hexapod would be a better starting point than a quadcopter. You would still need the motion correction, but at least the problem would be more constrained, and you would actually be able to hook it up to a power source that would allow it to run long enough to complete a print. A hexapod (or even a quadruped) motion platform could, at least in principle, climb up the geometry of the print as it goes. You would probably still need to print structures specifically for printing, but it would give you the freedom to experiment with different geometries for those structures, and there might even be cases where the parts you’re actually trying to print could be the supporting structures, especially if you are printing several identical pieces at once.
It’s still a wildly impractical idea… just one that’s a little more grounded.
1 Like
DLR made a drone with a robot arm but this still wouldn’t reach printing precision (ok if you print with a 5cm nozzle maybe). Also Ampelmann offers a nice stabilized stewart platform for ships.
There is btw a industrial SEAM printer with a stewart system
Not a direct solution here, but the problem reminds me of the legs “jackup” oil rigs use. (Can’t see how to post an image here? here’s a link) jackup oil rig
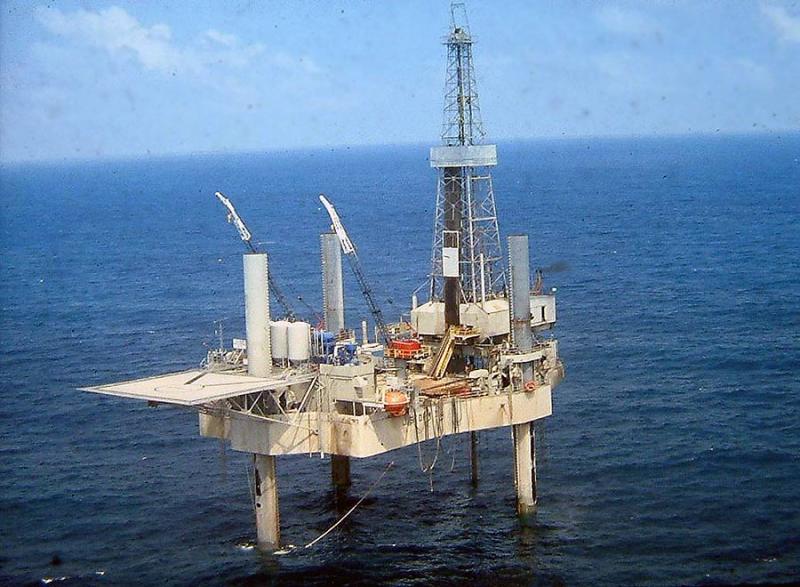{kind=link}
The vessel floats to position, then pushes down legs (on big hydraulic jacks or rack/pinion drives) and attaches more leg sections on top as needed. Once the legs hit the sea floor, the whole vessel is jacked up out of the water. The big ones can get to a few hundred feet of water depth.
The problem with any kind of leg you print and then climb is going to be position registration when you make the handover from desk-sitting to climbing. Likewise if you have pre-build feet that you add on to (like the jackup rig) you’re going to likely have a messy handover when you go from pre-built foot to the start of the printed tower.
A couple ideas:
-
Rigid chain actuator – this could be printed link by link on an angle while it’s being extended. Then just roll up for storage after the first print to a given elevation. I think printing it on an angle would help smooth the handover from pre-made to printed; it shouldn’t be too sensitive to some layer offset. You could have a little homing spot where the chain sits and the nozzle can tap a probe for locating.
-
Climbing a tube printed around the print seems like it may be the most stable approach. I would propose building up the tube as a helix, and the printer rotates up it as it climbs, with little windows in the tube for a traction mechanism to twist the whole printer.
3 Likes