Hi, Just a little presentation before the question. Last year I start doing robots for fun as a hobbie. I dont have schollar skills in robotics, eletronics, mechanics, or 3d design. Just learning adhoc from samples. My first project was a 2WD differential robot that do slam. It toke an year to do it, and I needed learn ROS programing and concepts for the purpose it. Then I decided to do an robotic arm, and Im thinking of use ROS again to control the arm. After some time exploring I found your robotic arm in thing verse (WE-R2.4) and start to build one of the actuators.
I have some questions about it. May be you be kind to help me. :).
First can we use metric screws and bolts? I read 4-40 but it not easy to find then were i lives. What are the recomended metric bolts?
how the top plate with the 4 holes is fixed to mantain the position?
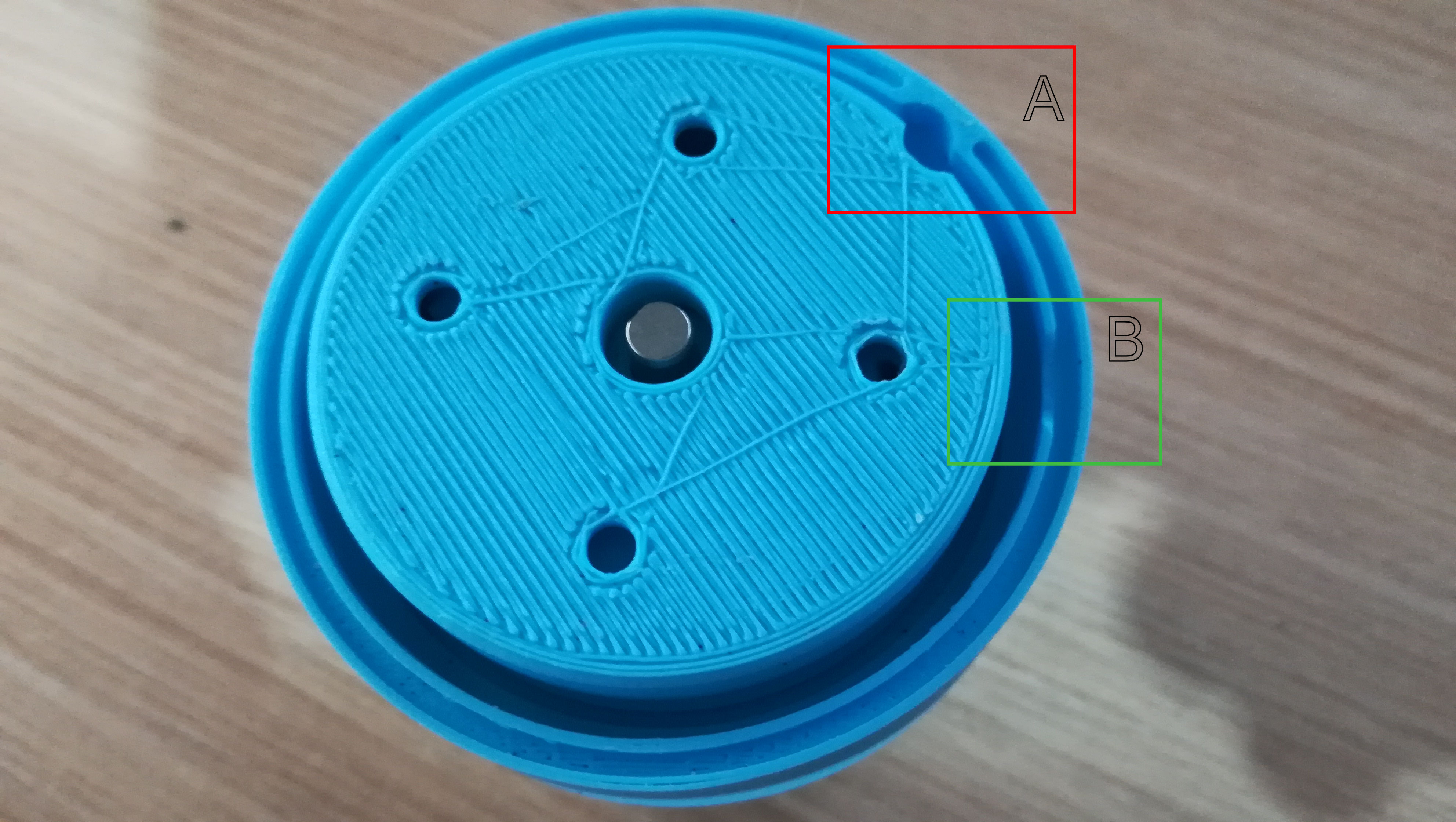
Regarding region A on picture. What is the purpose of the hole?
Regarding region B on picture. I try to put some 6mm steel balls (i dont have plastic yet) and it breaks the border? it seams that 6mm is to big. But the main problem is how to put the balls? does the hole in region A is related ?
I do believe that hole in Region A is where you add the steel balls to the track IIRC. As for hardware i would think M2-M3 would be pretty close to 4-40. Your thoughts @jlauer?
I would recommend you watch all 3 videos I posted on Youtube to understand the assembly on this. Yes, you could use metric. I think M3 is closest. I did not design this actuator, rather Jeff Kerr did. There’s been a lot of comments about moving to metric including with me asking as well, but that would take somebody else from the community to do. I did end up rebuilding the small actuator in Fusion 360 which should have more ability for folks to modify.
Does anyone has a link to Amazon or Aliexpress on where to buy the correct ones?
Is there a list or does someone know what and how many screws / bolts are required?
There are so many variations, different heads, lengths, pointed and non pointed screws.