Dear all, I am new to electronics but very much passionate to learn. I find building your own robot arm extremely exciting. Found this robot arm in Thingiverse a while back since then trying to get it going. Just managed to assemble basic version of actuator just to see if I can do it. Please advise what are all the parts I need and where to find the instructions (Certainly I found few of then at Thingiverse). For example, what is the mainboard/host board needed?
This is where all the info is stored for Johns version of Robot. Thingiverse I believe starts off with Jeff K’s robot but has links to Johns version.
Thank you for the reply, I went through postings under other topics & found the same.
Dear all, I received the boards today. In other post there was a question on the 0.0 Ohm resistor and that it will be there on the board. Please see image of the board I have. Please advise if the resistor is there to me in just all boards. Thank you.
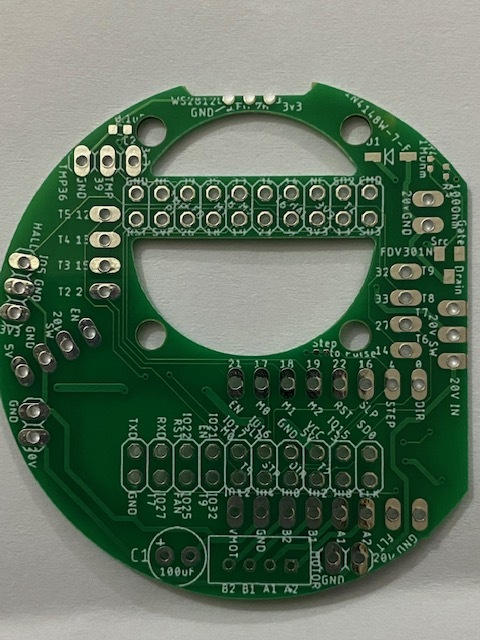
Do I need to get a 0.0 ohm surface mount resistor? If yes where it should be mounted exactly? Thank you.
No, you do not need the 0 ohm resister. The copper is connected there already. It’s only if you cut it, that you would need the 0 ohm resistor to reconnect. It’s the loopback signal to count steps while you’re jogging via pwm signals. The loopback should eventually be possible via software settings of the esp32 to do internal loopback, but i’ve never been able to figure out how to do that confi yet, so just doing a hard coded loopback to do step counting.
@jlauer, thank you for your earlier response to my inquiry. As requested, I’m posting in the user forums my questions I previously sent:
I’ve been following your Chilipeppr project for some time and have actually been incorporating it into practice. I’d like to extend my gratitude for making this online resource available for all of us to learn from and use freely. I’ve noticed you’ve posted a new project on a robotic arm are controlling it in Chilipeppr. I’ve been doing my fair share of research for the past couple of years on robot arms, IK’s, ROS, grasshopper plugins to solve IK’s, etc. I loved how you’ve incorporated in Chilipeppr this capability to run a multi-axis DOF arm. How do you access this ability in Chilipeppr? I didn’t see a robot arm Workspace option. Is this still in development or is the workspace located elsewhere? Lastly, is there documentation available for it as well? Other than ROS (which is incredibly cryptic to use and cumbersome), the robot chilipeppr workspace is an incredible tool that brings to robots the same opportunity you did with the TinyG and CNC workspace - it makes it accessible and approachable for anyone to learn from it. I am an absolute beginner in the realm of robotic arms.
I was hoping you can point me in the right direction on this. Again, thank you for all your efforts in providing us amazing tools to learn from and use.
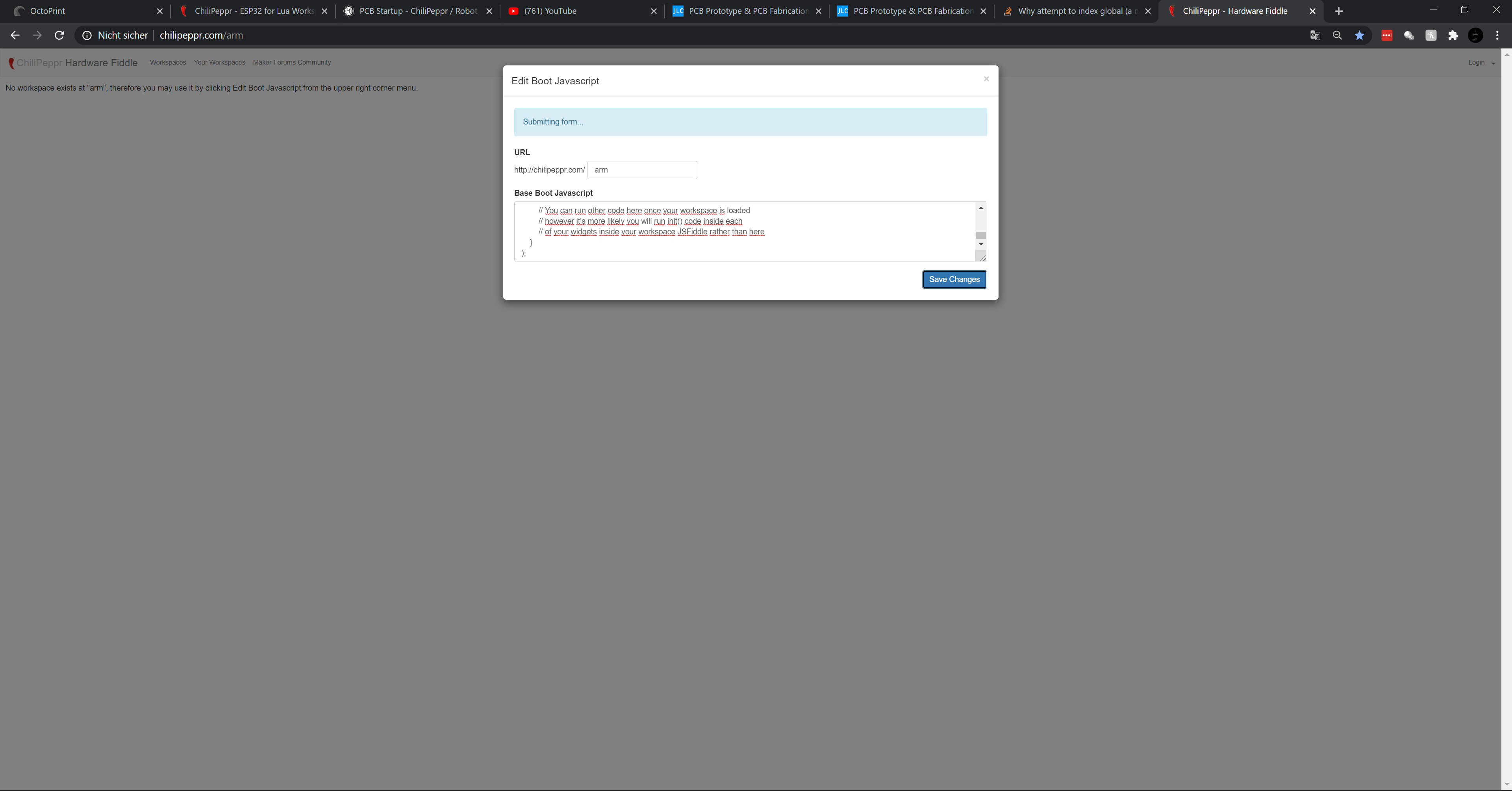
The way to access the workspace is at http://chilipeppr.com/arm and a screenshot is below, however, this is still quite the work in progress and I would say it’s not there yet. The concept I still love and I think this could work, but I’m getting really busy with work and thus have not had good progress in a while.

What would be awesome is if others wanted to run with it. I am staying very involved in any feedback and trying to reply quickly, so in that respect I’m highly engaged. And, the code for the actuator is at a spot where it does connect to the ChiliPeppr workspace and you can send/receive commands in the Axes widget to control the actuators.
The next step was to let you hit record to store the actuator positions as a line of Gcode. Then once you’ve recorded all of your positions let you play them back in order. The key, though, would be to let you pause at the correct moments, or delay movements, or add speed elements. The thought was to let you write macros, since there’s already a really nice macro widget, to control the logic. Macros are just Javascript so they could even make Ajax calls to the web, etc.
Indeed the goal was to bypass ROS because I, too, found ROS so cryptic I couldn’t get anywhere with it. I think being able to control a robot arm from a browser, visually see it, and write Javascript to control it would be game changer. I’d love the help.
Hey dear maker comunity
I got a problem with the Chilipeppr arm Workspace. Jesterday I could open the Woorkspace with no problem, but since Today I get an eror and cant open it. Does anybody ave a solution for this?
ok, got it working. i did have to hit reload a few times as the 3d viewer wasn’t loading, so if you get a black screen where the 3d viewer is, hit reload. i don’t have my caching turned on yet as it relies on the DataStore, thus it’s pulling everything down via proxy back to the Github repos every time you load the page, which is heavy.

Hi there.
John this is great work and I am 1/2 way through building the arm…
I am quite familiar with arduino - but learning how to put lau on the esp32 and then push your sw via the chillipeppr.com - This website is for sale! - chillipeppr Resources and Information. workspace has got me stuck. I see in the the editor allows you to write your own scripts, push them to the ESP via the serial java widjet and save them to a cache, (that all works for me) but how can I load in to the editor all of Johns current lau files from my disk - and then save edited ones back? I don’t even seem to be able to copy/paste file by file into the editor… Any help appreciated. Mark
For anyone still listening on this Forum.
I intend to build this robot arm.
To date I have managed to get a couple of the ESP32s programmed with Johns v8 lau code, and breadboard the stepper controller and jog the steppers from the workspace.
I got my xbox controller to connect - but it seems to lack ability to drive the base and shoulder…
Havent figured out how to create or send gcode to the micros yet, and the simulated arm does not seem to do much and its linkages are broken. Lots of work still remains to be done in this workspace…
Even so, I should be able to use his code for controlling the arm - even if from another system.
The pub/sub architecture is cool.
I will prob build my own pcb - as I like to do that.
2 Likes