I’m at home because pandemic (I am very grateful that I am working from home!) and I just got my corexy build starting to work well. In particular, it’s now working better in every respect than my junk gantry hictop printer that got me into this 3d printing world in the first place.
But when it comes to printing emergency protective gear, could I do more, faster?
I became curious: Could I, with leftovers and excess stock sitting around the house from other projects, together with parts from the existing gantry printer, make a substantially better gantry printer? From the previous rebuild, I have a couple of 450mm MGN12 clone (“chiwin”) rails that work. From another project, I have an extra 330mm 1204 ball screw. I’ve come up with a design I can build with buying only a small 100 tooth GT2 belt; everything else is sitting around the house. (I think: I haven’t measured to make sure I have all the necessary lengths of extrusion; but there’s enough flexibility in the design that I’m pretty sure I can make it work anyway.)
I’ve been messing around in OpenSCAD for the design, so I don’t have a STEP or IGES file. I’ve only roughed out most of the hardware (e.g. hot end, bearings, ball screw and nut) just barely enough to be confident of size and fit. I haven’t modeled many of the parts; extruder, bearings, pulleys, idlers, belts, drag chain, wires, fans, or electronics in general; I just know where those go, at least where it matters, and am now pretty confident it can work.
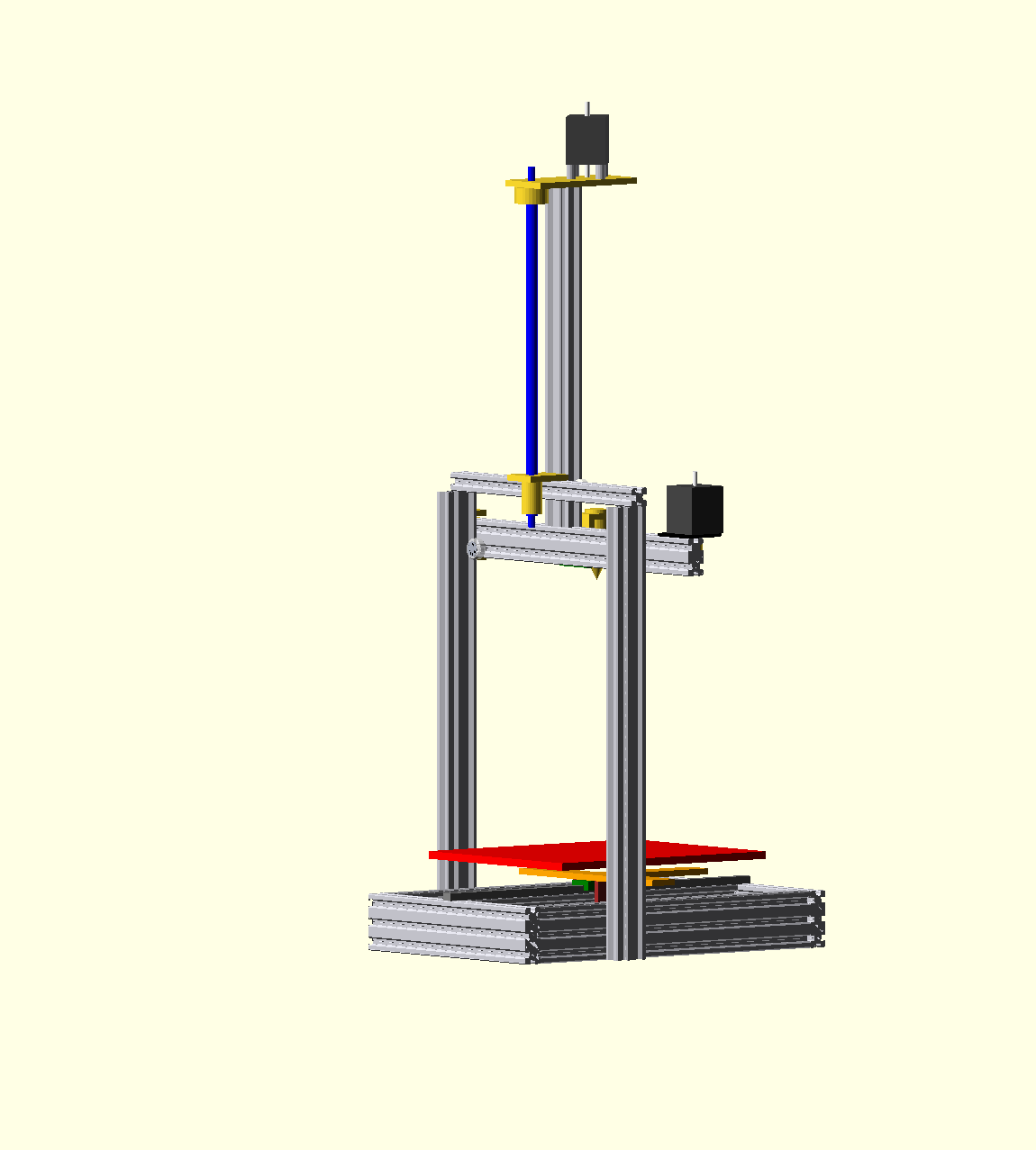
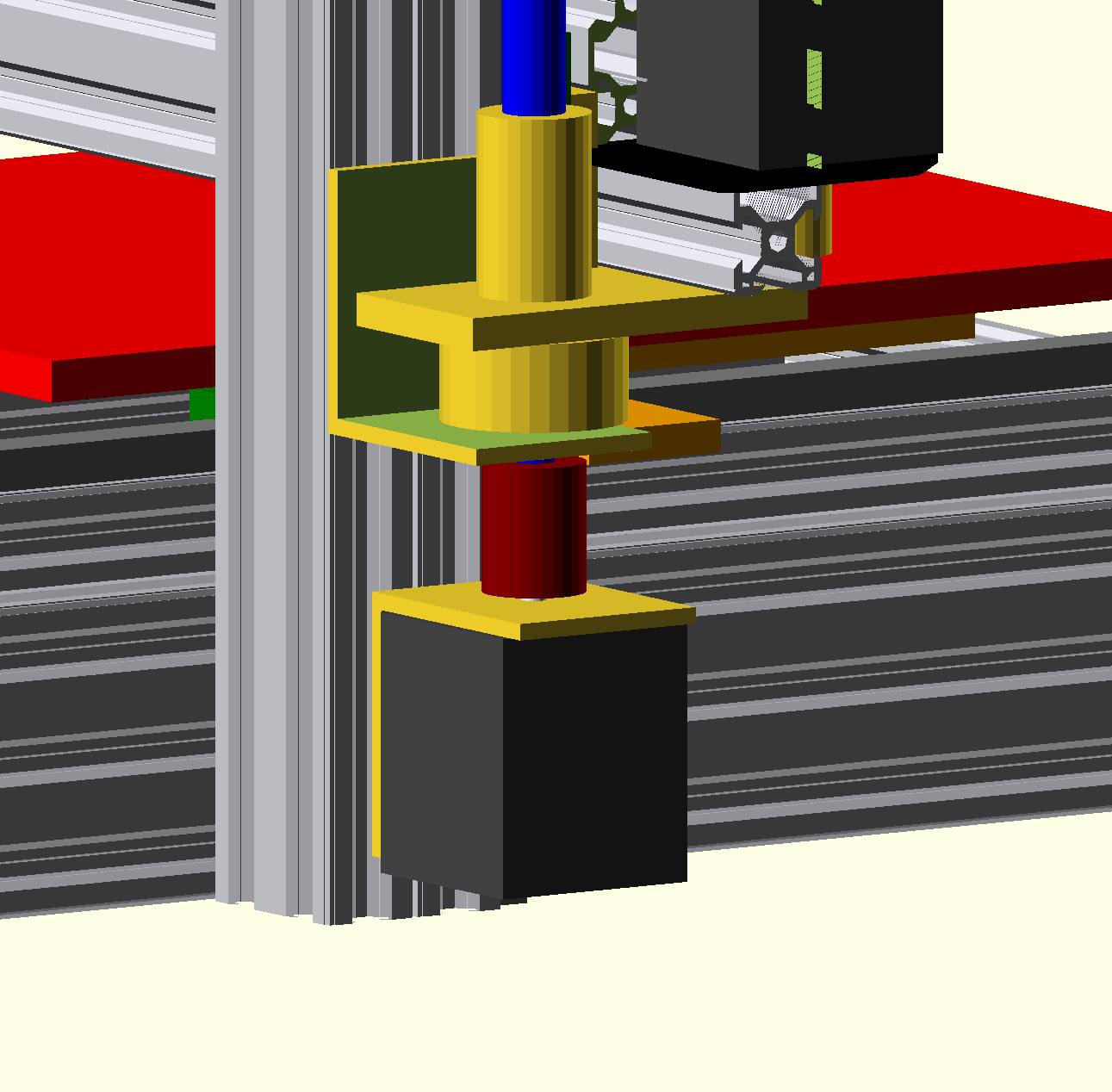
I tried to avoid an overconstrained design. I used one motor per axis, with no need to transfer synchronized motion. It is designed to enable an enclosure that is at the top of the fixed gantry; the lead screw and pillar of the inverted T would go through and stick out the top; that’s why the Z motor is mounted on top instead of below the Z gantry plate.
I haven’t seen this “inverted T” single-screw gantry printer approach before. Has anyone here seen a gantry printer with this design?
It’s designed for a kinematic bed mount. I do have parts on hand to make that work though I might choose a different design that requires ordering a couple more parts.
Here are some pictures, including animated gifs, to show what it looks like:
First, an animation of all three axes moving simultaneously:

With the gantry raised to max Z, front and back: