I just cannot get the pin to move down. I run G32 in the start of my print but it does not drop the pin and the z axis just keeps going down and I have to shut off the machine.
I have my Z-min set up on the Z-max pin (1.29) and the Z-probe on the Z-min pin (1.28). Home works fine but once it tries to probe that is where it is not working. When I turn on the machine the BLtouch does the self test where the pin moves up and down and ends with the red light solid.
Here is what I have in my config for endstops and Z-probe. Anyone spot anything that is off?
## Endstops
endstops_enable true # the endstop module is enabled by default and can be disabled here
#corexy_homing false # set to true if homing on a hbot or corexy
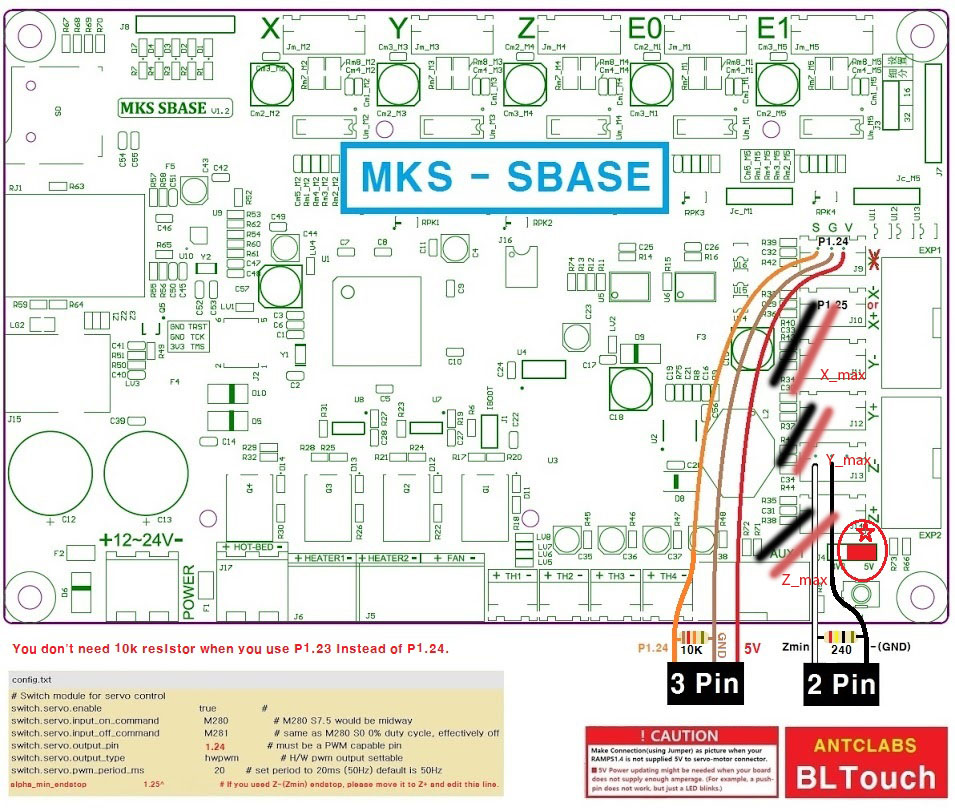
alpha_min_endstop 1.24^ # add a ! to invert if endstop is NO connected to ground
#alpha_max_endstop 1.25^ # NOTE set to nc if this is not installed
alpha_homing_direction home_to_min # or set to home_to_max and set alpha_max
alpha_min 0 # this gets loaded after homing when home_to_min is set
alpha_max 210 # this gets loaded after homing when home_to_max is set
beta_min_endstop 1.26^ #
#beta_max_endstop 1.27^ #
beta_homing_direction home_to_min #
beta_min 0 #
beta_max 210 #
gamma_min_endstop 1.29^ #
#gamma_max_endstop 1.29^ #
gamma_homing_direction home_to_min #
gamma_min 0 #
gamma_max 170 #
alpha_max_travel 220 # max travel in mm for alpha/X axis when homing
beta_max_travel 220 # max travel in mm for beta/Y axis when homing
gamma_max_travel 170 # max travel in mm for gamma/Z axis when homing
- optional order in which axis will home, default is they all home at the same time,
- if this is set it will force each axis to home one at a time in the specified order
#homing_order XYZ # x axis followed by y then z last
#move_to_origin_after_home false # move XY to 0,0 after homing
- optional enable limit switches, actions will stop if any enabled limit switch is triggered
#alpha_limit_enable false # set to true to enable X min and max limit switches
#beta_limit_enable false # set to true to enable Y min and max limit switches
#gamma_limit_enable false # set to true to enable Z min and max limit switches
alpha_fast_homing_rate_mm_s 50 # feedrates in mm/second
beta_fast_homing_rate_mm_s 50 # "
gamma_fast_homing_rate_mm_s 4 # "
alpha_slow_homing_rate_mm_s 25 # "
beta_slow_homing_rate_mm_s 25 # "
gamma_slow_homing_rate_mm_s 2 # "
alpha_homing_retract_mm 3 # distance in mm
beta_homing_retract_mm 3 # "
gamma_homing_retract_mm 1 # "
#endstop_debounce_count 100 # uncomment if you get noise on your endstops, default is 100
###########
- Z-PROBE #
###########
zprobe.enable true # Set to true to enable the Z-probe module. This is used to scan surfaces, and to calibrate parameters and
compensate for non-planar surfaces.
zprobe.probe_pin 1.28 # Pin the probe is connected to.
zprobe.slow_feedrate 5 # Speed in millimetres/second at which the probe seeks a surface.
zprobe.fast_feedrate 100 # Speed in millimetres/second at which the probe does fast moves.
zprobe.return_feedrate 50 # Speed in millimetres/second at which the probe does the return after a probe.
#zprobe.debounce_count 100 # Debounce the probe pin over this number of values. Set to 100 if your probe is too noisy and give false readings.
zprobe.probe_height 5 # Distance above the bed at which the probing is started, once the bed’s height is known.
- Leveling strategy
leveling-strategy.three-point-leveling.enable true #
leveling-strategy.three-point-leveling.point1 100.0,0.0 # The first probe point (X, Y)
leveling-strategy.three-point-leveling.point2 200.0,200.0 # The second probe point (X, Y)
leveling-strategy.three-point-leveling.point3 0.0,200.0 # The third probe point (X, Y)
leveling-strategy.three-point-leveling.home_first true # Home the X and Y axes before probing
leveling-strategy.three-point-leveling.tolerance 0.03 # The probe tolerance in millimetres, anything less that this will be ignored, default is 0.03mm
leveling-strategy.three-point-leveling.probe_offsets 0,0,0 #
leveling-strategy.three-point-leveling.save_plane false # Set to true to allow the bed plane to be saved with M500, default is false
switch.servo.enable true
switch.servo.input_on_command M280 S3.0 #M280 S7.5 WOULD BE MIDWAY, PS3.0 push down, PS7.0 push up, PS8.4 self test
switch.servo.input_off_command M281 S7.0 #Same as M280 S0% duty cycle, effectively off
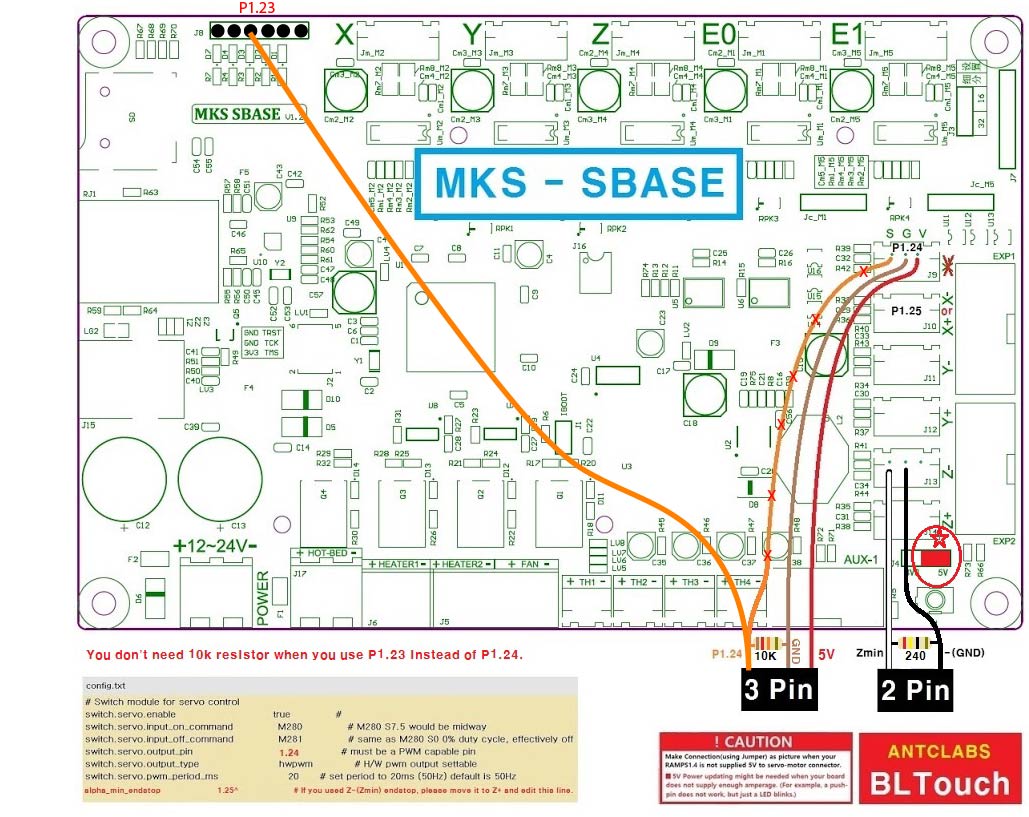
switch.servo.output_pin 1.23 #must be pwm capable pin
switch.servo.output_type hwpwm #H/W pwm output settable
switch.servo.pwm_period_ms 20 #set period to 20 ms
#switch.servo.is_servo true