One project that I saw on the web somewhere and determined to make was a self-righting robot. I thought I’d post it here in case it is of interest and, possibly, to enlist help if/when the almost completed build doesn’t work 
This project has been hanging around my HDD for a few weeks. It is my mongrel-cross of two very similar projects I found on YouTube.
(I’ll add more details and credit the original authors properly when I track the videos in my YouTube history later).
The build is basically 3 horizontal sheets of ply, with 4 threaded bars passing through the corners to form a vertical platform structure as below (sorry it is upside down and the top ply sheet is not yet fitted).
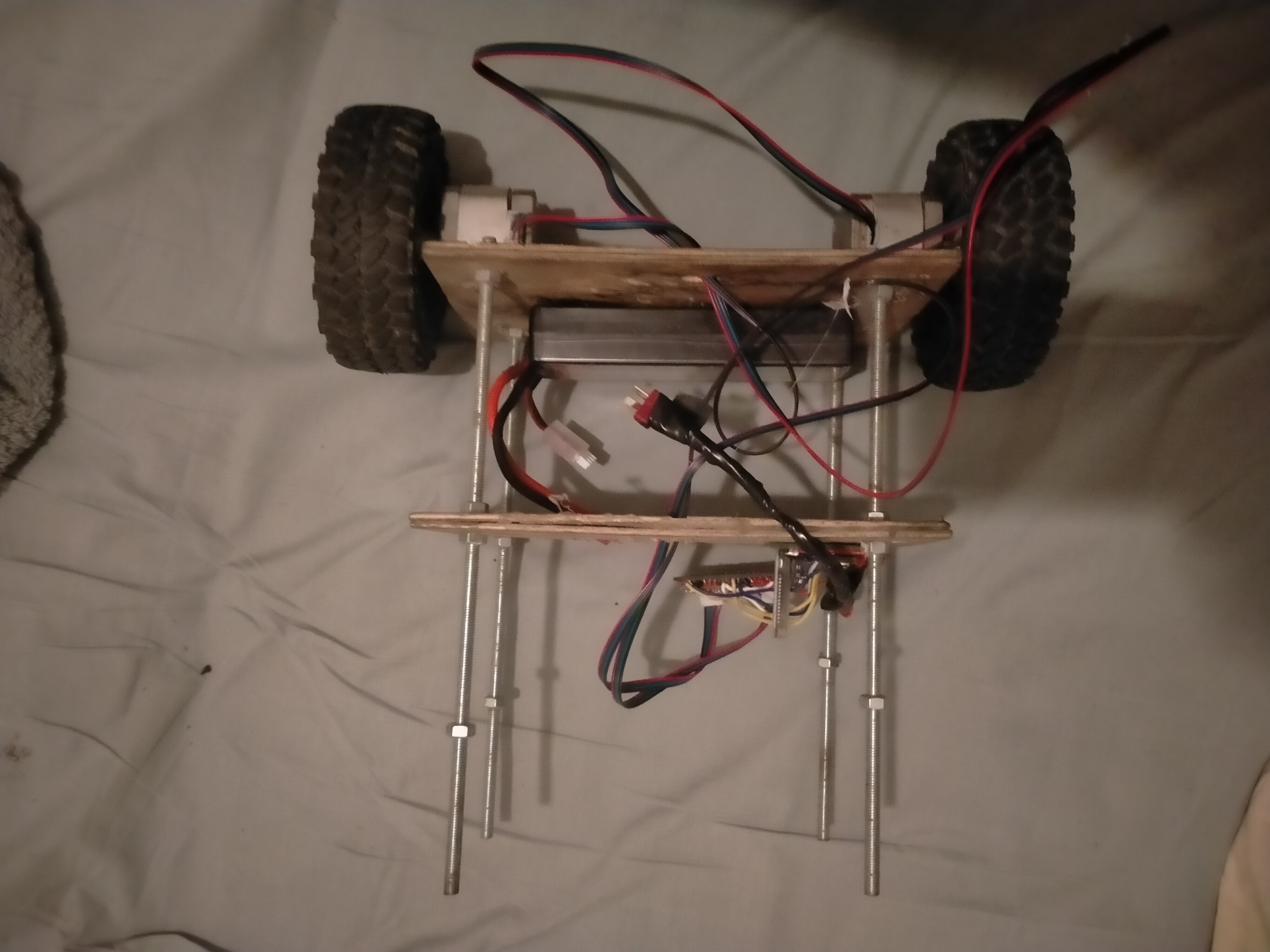
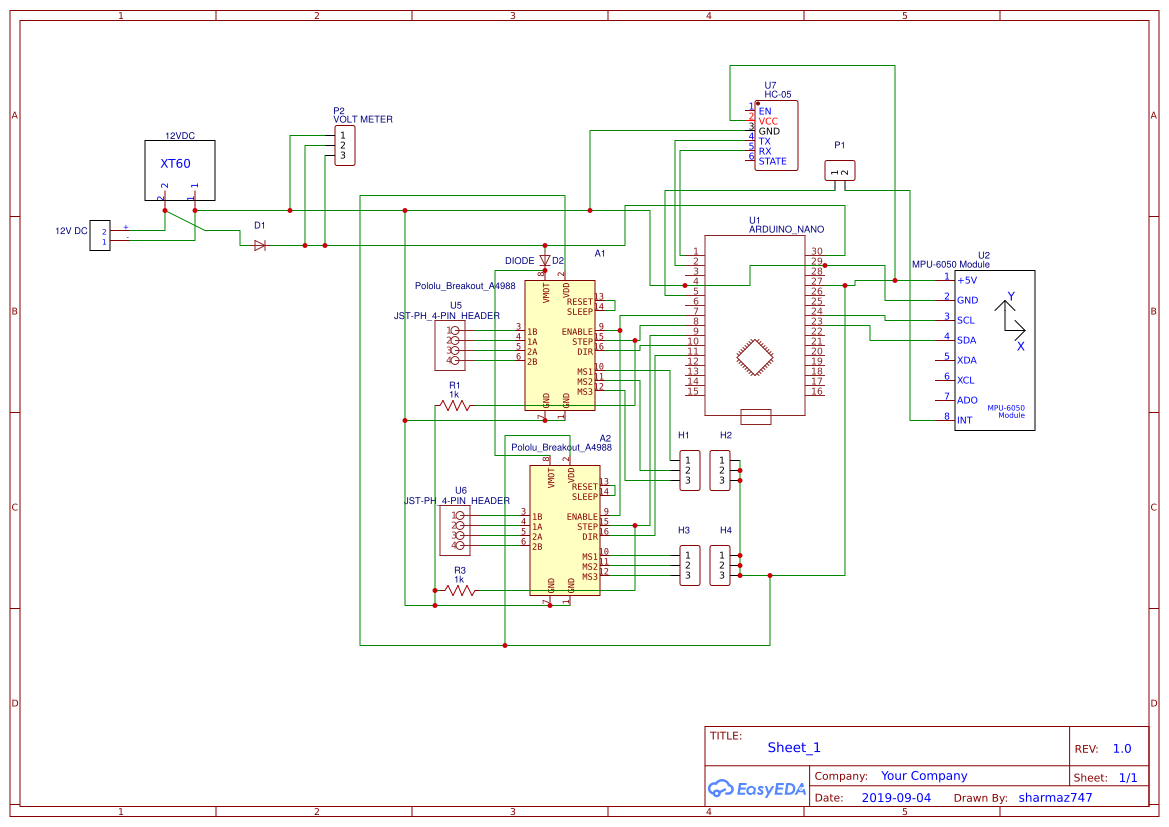
As regards the electronics, the wheels are driven by 2 x Neema 17 stepper motors that I had spare, via a pair of driver modules (A4988s), connected to an Arduino (nano) holding the control software ( a hacked version of a generic remote control program called Multiwii). This is further connected to a Bluetooth module (HC-05) to provide a mobile phone user interface, and an accelerometer/gyro module (MPU 6050) to sense the orientation of the robot and allow the control software to pulse the stepper motors back and forward to keep the thing upright. Finally, power comes from a LIPO battery (a fairly meaty 7.4V 5.2 Ah unit designed for racing drones).
Here’s a circuit diagram for the electronics, which you can probably just see on the picture above.
I’m just finishing securing the circuit board and battery properly, before I move to test the circuit and tidy up the wiring. All being well I hope to, upload the control software later tonight and test it.
I’ll report back later when I’ve tracked-down the sources and, fingers crossed, got it working.
Regards
Chris